综合很重要的一步是把 HDL 的逻辑变成一个个单元,这些单元加上连接方式就成为了网表。那么,基本单元有哪些,怎么决定用哪些基本单元?
这个就需要工艺库了,工艺库定义了一个个单元,单元的引脚、功能,还有各种参数,这样 Design Compiler 就可以按照这些信息去找到一个优化的网表。
网上可以找到一些 Liberty 格式的工艺库,比如 Nangate45,它的设定是 25 摄氏度,1.10 伏,属于 TT(Typical/Typical)的 Process Corner。
在里面可以看到一些基本单元的定理,比如 AND2_X1,就是一个 drive strength 是 1 的二输入与门:
cell (AND2_X1) {
drive_strength : 1;
pin (A1) {
direction : input;
}
pin (A2) {
direction : input;
}
pin (ZN) {
direction : output;
function : "(A1 & A2)";
}
/* ... */
}
这样就定义了两个输入 pin,一个输出 pin,还有它实现的功能。还有很重要的一点是保存了时序信息,比如:
lu_table_template (Timing_7_7) {
variable_1 : input_net_transition;
variable_2 : total_output_net_capacitance;
index_1 ("0.0010,0.0020,0.0030,0.0040,0.0050,0.0060,0.0070");
index_2 ("0.0010,0.0020,0.0030,0.0040,0.0050,0.0060,0.0070");
}
cell (AND2_X1) {
pin (ZN) {
timing () {
related_pin : "A1";
timing_sense : positive_unate;
cell_fall(Timing_7_7) {
index_1 ("0.00117378,0.00472397,0.0171859,0.0409838,0.0780596,0.130081,0.198535");
index_2 ("0.365616,1.893040,3.786090,7.572170,15.144300,30.288700,60.577400");
values ("0.0217822,0.0253224,0.0288237,0.0346827,0.0448323,0.0636086,0.100366", \
"0.0233179,0.0268545,0.0303556,0.0362159,0.0463659,0.0651426,0.101902", \
"0.0296429,0.0331470,0.0366371,0.0425000,0.0526603,0.0714467,0.108208", \
"0.0402311,0.0440292,0.0477457,0.0538394,0.0641187,0.0829203,0.119654", \
"0.0511250,0.0554077,0.0595859,0.0662932,0.0771901,0.0963434,0.133061", \
"0.0625876,0.0673198,0.0719785,0.0794046,0.0910973,0.110757,0.147656", \
"0.0748282,0.0800098,0.0851434,0.0933663,0.106111,0.126669,0.163872");
}
}
}
首先要看 cell_fall 后面的 template 是 Timing_7_7,可以看到 variable_1 和 variable_2 对应的是 input_net_transition 和 total_output_net_capacitance。这里 cell_fall 指的是输出 pin ZN 从 1 变成 0 的时候,这个变化从 A1 的变化传播到 ZN 的时间,这个时间和输入的 transition 时间(大概是从 0 到 1、从 1 到 0 的时间,具体从多少百分比到多少百分比见设置)和输出的 capacitance 有关,所以是一个查找表,查找的时候找最近的点进行插值。输出的 capacitance 取决于 wire load 和连接了这个输出的其他单元的输入。
除了 cell_fall/cell_rise 两种类型,还有 fall_transition 和 rise_transition,这就是输出引脚的变化时间,又作为后继单元的输入 transition 时间。
接下来,还能看到功耗的数据:
power_lut_template (Power_7_7) {
variable_1 : input_transition_time;
variable_2 : total_output_net_capacitance;
index_1 ("0.0010,0.0020,0.0030,0.0040,0.0050,0.0060,0.0070");
index_2 ("0.0010,0.0020,0.0030,0.0040,0.0050,0.0060,0.0070");
}
internal_power () {
related_pin : "A1";
fall_power(Power_7_7) {
index_1 ("0.00117378,0.00472397,0.0171859,0.0409838,0.0780596,0.130081,0.198535");
index_2 ("0.365616,1.893040,3.786090,7.572170,15.144300,30.288700,60.577400");
values ("2.707163,2.939134,3.111270,3.271119,3.366153,3.407657,3.420511", \
"2.676697,2.905713,3.073189,3.236823,3.334156,3.373344,3.387400", \
"2.680855,2.891263,3.047784,3.212948,3.315296,3.360694,3.377614", \
"2.821141,3.032707,3.182020,3.338567,3.444608,3.488752,3.508229", \
"3.129641,3.235525,3.357993,3.567372,3.743682,3.792092,3.808289", \
"3.724304,3.738737,3.808381,3.980825,4.147999,4.278043,4.311323", \
"4.526175,4.492292,4.510220,4.634217,4.814899,4.934862,5.047389");
}
rise_power(Power_7_7) {
index_1 ("0.00117378,0.00472397,0.0171859,0.0409838,0.0780596,0.130081,0.198535");
index_2 ("0.365616,1.893040,3.786090,7.572170,15.144300,30.288700,60.577400");
values ("1.823439,1.926997,1.963153,2.028865,1.957837,2.123314,2.075262", \
"1.796317,1.896145,1.960625,2.014112,2.050786,2.046472,1.972327", \
"1.811604,1.886741,1.955658,1.978263,1.965671,1.963736,2.071227", \
"1.997387,2.045930,2.092357,2.063643,2.099127,1.932089,2.131341", \
"2.367285,2.439718,2.440043,2.403446,2.305848,2.351146,2.195145", \
"2.916140,2.994325,3.044451,2.962881,2.836259,2.781564,2.633645", \
"3.687718,3.756085,3.789394,3.792984,3.773583,3.593022,3.405552");
}
}
可以看到,这也是一个查找表,也是按照输出的 rise/fall 有不同的功耗。巧合的是,功耗的查找表的 index_1/index_2 和上面的时序查找表是一样的。除了 internal power,还有 leakage power,定义如下:
leakage_power_unit : "1nW";
/* ... */
cell_leakage_power : 50.353160;
leakage_power () {
when : "!A1 & !A2";
value : 40.690980;
}
leakage_power () {
when : "!A1 & A2";
value : 62.007550;
}
leakage_power () {
when : "A1 & !A2";
value : 41.294331;
}
leakage_power () {
when : "A1 & A2";
value : 57.419780;
}
可以看到,它的 leakage power 取决于输入的状态,单位是 1nW。
再来看 Flip Flop 的定义:
cell (DFFRS_X1) {
ff ("IQ" , "IQN") {
next_state : "D";
clocked_on : "CK";
preset : "!SN";
clear : "!RN";
clear_preset_var1 : L;
clear_preset_var2 : L;
}
pin (D) {
direction : input;
capacitance : 1.148034;
fall_capacitance : 1.081549;
rise_capacitance : 1.148034;
timing () {
related_pin : "CK";
timing_type : hold_rising;
when : "RN & SN";
sdf_cond : "RN_AND_SN === 1'b1";
fall_constraint(Hold_3_3) {
index_1 ("0.00117378,0.0449324,0.198535");
index_2 ("0.00117378,0.0449324,0.198535");
values ("0.002921,0.012421,0.011913", \
"0.002707,0.008886,0.005388", \
"0.139993,0.148595,0.137370");
}
rise_constraint(Hold_3_3) {
index_1 ("0.00117378,0.0449324,0.198535");
index_2 ("0.00117378,0.0449324,0.198535");
values ("0.004193,0.015978,0.019836", \
"0.020266,0.031864,0.035343", \
"0.099118,0.113075,0.120979");
}
}
}
}
可以看到,这里的属性变成了 setup/hold 时间。
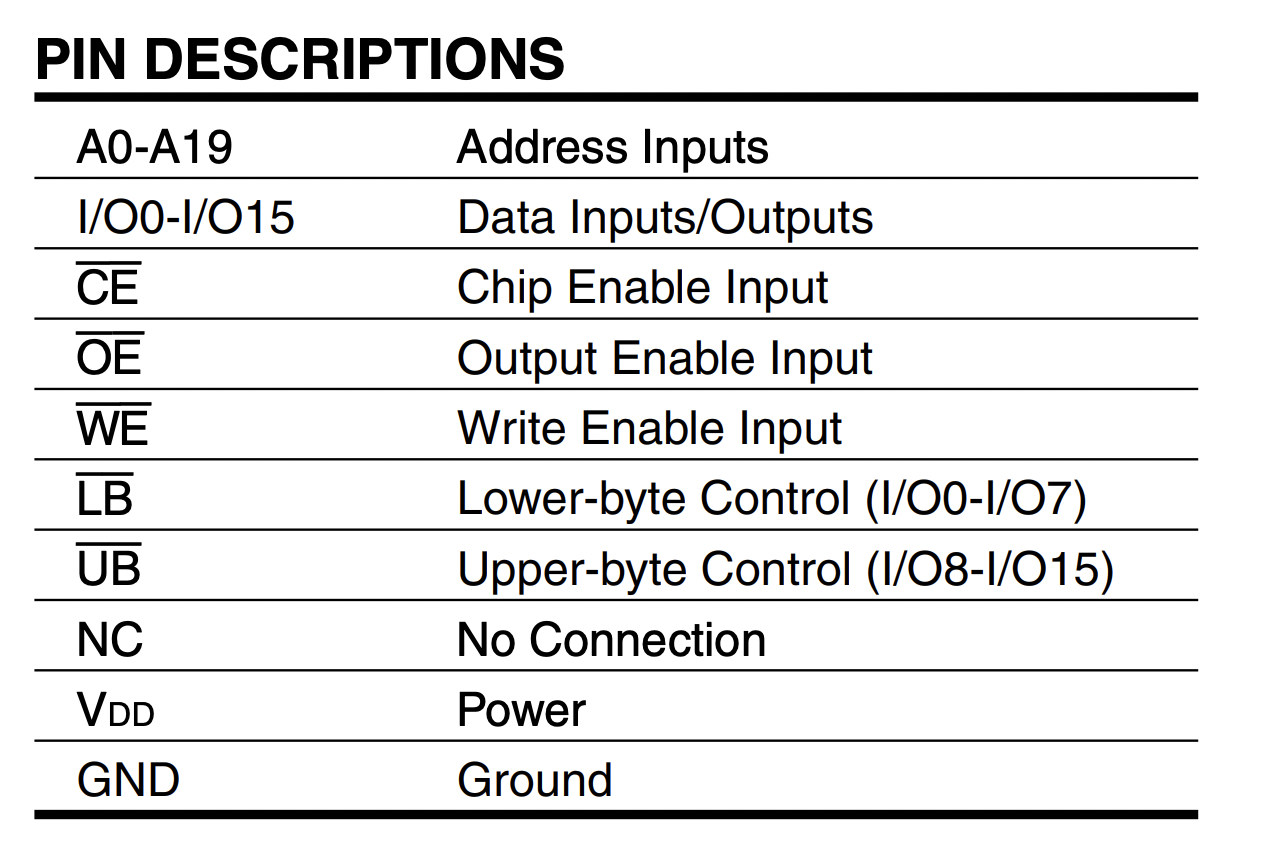
SRAM 也有类似的定义,通常是写在单独的 lib 文件中,根据 width 和 depth 生成,比如 fakeram45_32x64.lib:
cell(fakeram45_32x64) {
area : 1754.536;
interface_timing : true;
memory() {
type : ram;
address_width : 5;
word_width : 64;
}
pin(clk) {
direction : input;
min_period : 0.174 ;
internal_power(){
rise_power(scalar) {
values ("1498.650")
}
fall_power(scalar) {
values ("1498.650")
}
}
}
bus(wd_in) {
bus_type : fakeram45_32x64_DATA;
direction : input;
timing() {
related_pin : clk;
timing_type : setup_rising ;
rise_constraint(scalar) {
values ("0.050");
}
fall_constraint(scalar) {
values ("0.050");
}
}
internal_power(){
when : "(we_in)";
rise_power(scalar) {
values ("14.987");
}
fall_power(scalar) {
values ("14.987");
}
}
}
}
也可以类似地看到,它的输入 setup/hold,功耗,面积等等信息。
在给 Design Compiler 配置工艺库前,需要用 Library Compiler 先把 lib 格式转换为更紧凑的二进制 db 格式:
read_lib xxx.lib
write_lib -format db xxx
实测部分 Liberty 文件会报错,不知道有没有修复的办法。另外,不同版本的 Library Compiler 生成的格式也不大一样,但都是兼容的。
在 Design Compiler 中,设置当前工艺库命令:
set_app_var target_library xxx.db
set_link_var target_library xxx.db
# or
set_app_var target_library {xxx.db yyy.db}
set_link_var target_library {xxx.db yyy.db}
准备好工艺库以后,就可以开始编写综合脚本了,通常有这么些步骤:
# step 1: read source code & set top level module name
read_file -format verilog xxx.v
read_file -format vhdl yyy.vhdl
current_design xxx
# step 2: setup timing constraints
create_clock clock -period 1.0000 # 1GHz for example
# other timing constraints:
# e.g. set_input_delay/set_output_delay
# step 3: synthesis
link
uniquify
# use this if you want to ungroup all hierarchy
# ungroup -flatten -all
# use this to retime design
# set_optimize_registers
compile_ultra
# step 4: check & report
check_timing
check_design
report_design
report_area -hierarchy
report_power -hierarchy
report_cell
report_timing -delay_type max
report_timing -delay_type min
report_constraint -all_violators
report_qor
# step 5: export
write -format ddc -hierarchy -output xxx.ddc
write_sdc -version 1.0 xxx.sdf
write -format verilog -hierarchy -output xxx.syn.v
write_sdc xxx.sdc
根据需求,进行自定义的修改。综合完成后,可以看到生成的 xxx.syn.v 文件里都是一个个的 cell,比如:
AND2X2 U3912 ( .A(n4416), .B(n2168), .Y(n3469) );
OAI21X1 U3913 ( .A(n2872), .B(n4589), .C(n2461), .Y(n3471) );
DFFPOSX1 clock_r_REG147_S1 ( .D(n7634), .CLK(clock), .Q(n7773) );
还有一些比较特殊的 cell,比如 TIEHI/TIELO 就是恒定输出 1/0,用于门控时钟的 CLKGATE/ICG 等,还有一些综合阶段不会出现的 cell,在后续阶段会使用。