SDRAM (Synchronous Dynamic Random Access Memory)
特点
SDRAM 的特点:
- 成本较低,每个 1 bit cell 只需要一个 CMOS 晶体管
- 接口复杂,访问数据前需要首先激活一个 row,再读取 row 内的数据
- 控制器也比较复杂,需要定期刷新内存
- 容量较大,由于 row 和 column 复用了地址线,单内存条可以做到 GB 级别的容量
标准
SDRAM 相关标准由 JEDEC 制定:
- JESD79F: DDR SDRAM
- JESD79-2F: DDR2 SDRAM
- JESD79-3F: DDR3 SDRAM
- JESD79-4D: DDR4 SDRAM
- JESD79-5B: DDR5 SDRAM
除了 DDR 系列,还有低功耗的 LPDDR 系列:
- JESD209B: LPDDR SDRAM
- JESD209-2F: LPDDR2 SDRAM
- JESD209-3C: LPDDR3 SDRAM
- JESD209-4D: LPDDR4 SDRAM
- JESD209-5B: LPDDR5 SDRAM
高性能常用的 HBM 也基于 SDRAM 技术:
还有 GDDR SGRAM 系列:
- SDRAM3.11.5.8 R16.01: GDDR4 SGRAM
- JESD212C.01: GDDR5 SGRAM
- JESD232A.01: GDDR5X SGRAM
- JESD250D: GDDR6 SGRAM
下面主要介绍 DDR 系列的 SDRAM。
概念
DDR SDRAM 通常会有一个数字来代表它的性能,例如 DDR4-2133 中的 2133,有时候会见到 2400 MT/s 的说法。这两者说的都是 SDRAM 每秒最多进行的数据传输次数,单位是 Million Transfers per Second。由于 SDRAM 采用 DDR 进行传输,一个时钟周期传输两份数据,所以实际的时钟频率要除以二,例如 2133 MT/s 对应时钟频率就是 1066 MHz。
有时还会见到 PC4-21333 的写法用于描述内存条,这里的 \(21333=8*2666\),对应了 2666 MT/s,乘以 8 是因为 DDR 内存条的数据位宽是 64 位,那么一个 2666 MT/s 的内存条其理论内存带宽就是 \(2666 \mathrm{(MT/s)} * 64 \mathrm{(bits)} / 8 \mathrm{(bits/byte)} = 21333 \mathrm{(MB/s)}\)。但也有些时候 PC4 后面跟着的就是 MT/s。
不同代次的内存条,下面引脚的缺口位置不同,所以是无法插错地方的。
结构
以 DDR4 SDRAM 为例,下面是 MT40A1G8 芯片的结构图:
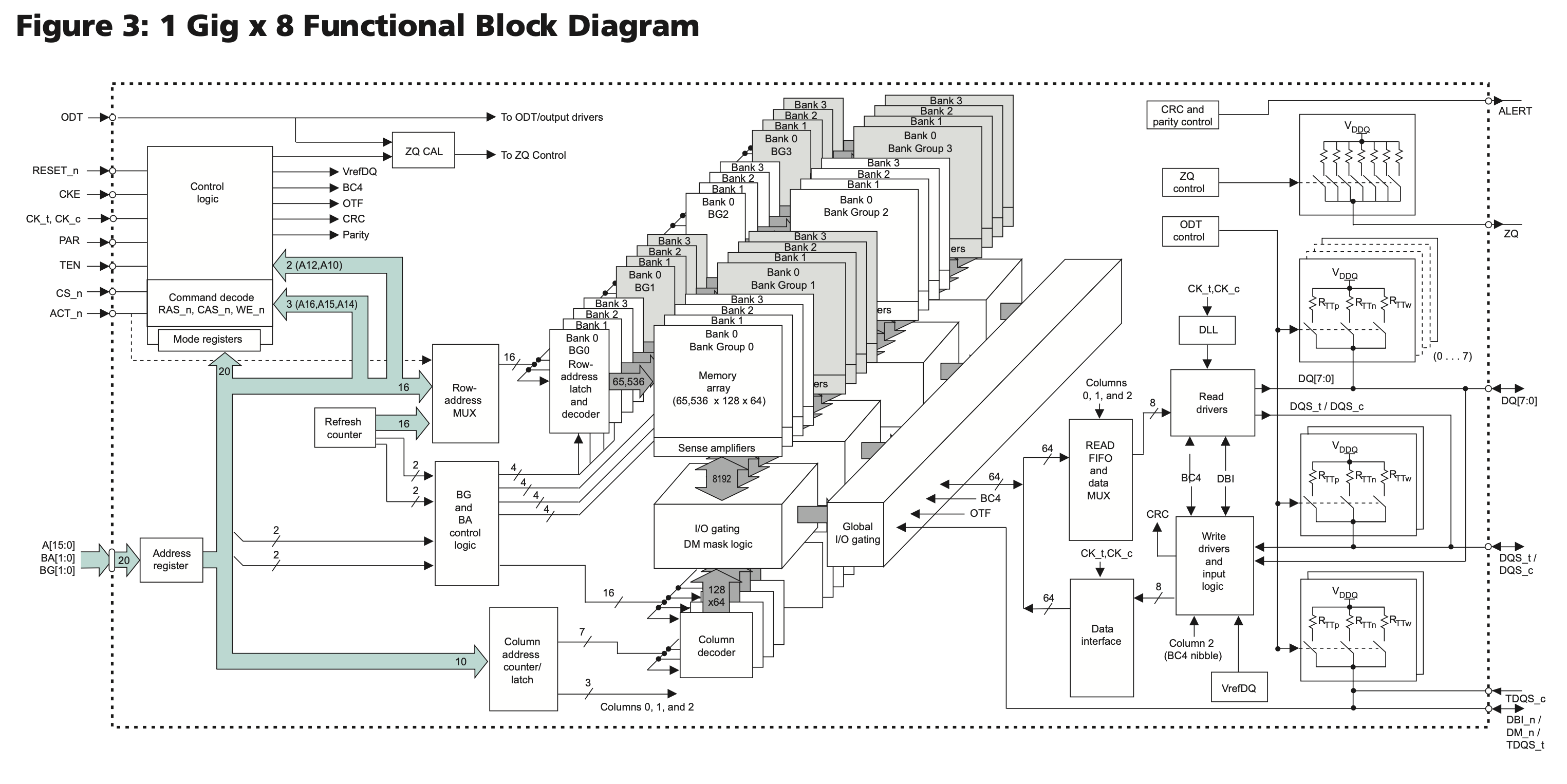
保存数据的是中间的 Memory array,每个 Memory array 的规格是 65536 x 128 x 64,称为一个 Bank;四个 Bank 组成一个 Bank Group,一共有 4 个 Bank Group,所以总容量是 \(65536 * 128 * 64 * 4 * 4 = 8 \mathrm{Gb}\)。
具体地,每个 Memory array 的 65536 x 128 x 64 的规格里,65536 表示 row 的数量,每个 row 保存了 \(128 * 64 = 8192\) 位的数据,同时也是图 1 中 Sense amplifier 到 I/O gating, DM mask logic 之间传输的位宽。每个 row 有 1024 个 column,每个 column 保存了 8 位的数据(对应 1 Gig x 8 中的 8)。由于 DDR4 的 prefetch 宽度是 8n,所以一次访问会取出 8 个 column 的数据,也就是 64 位。那么每个 row 就是 128 个 64 位数据,这就是上面所说的 65536 x 128 x 64 的 128 x 64 的来源。
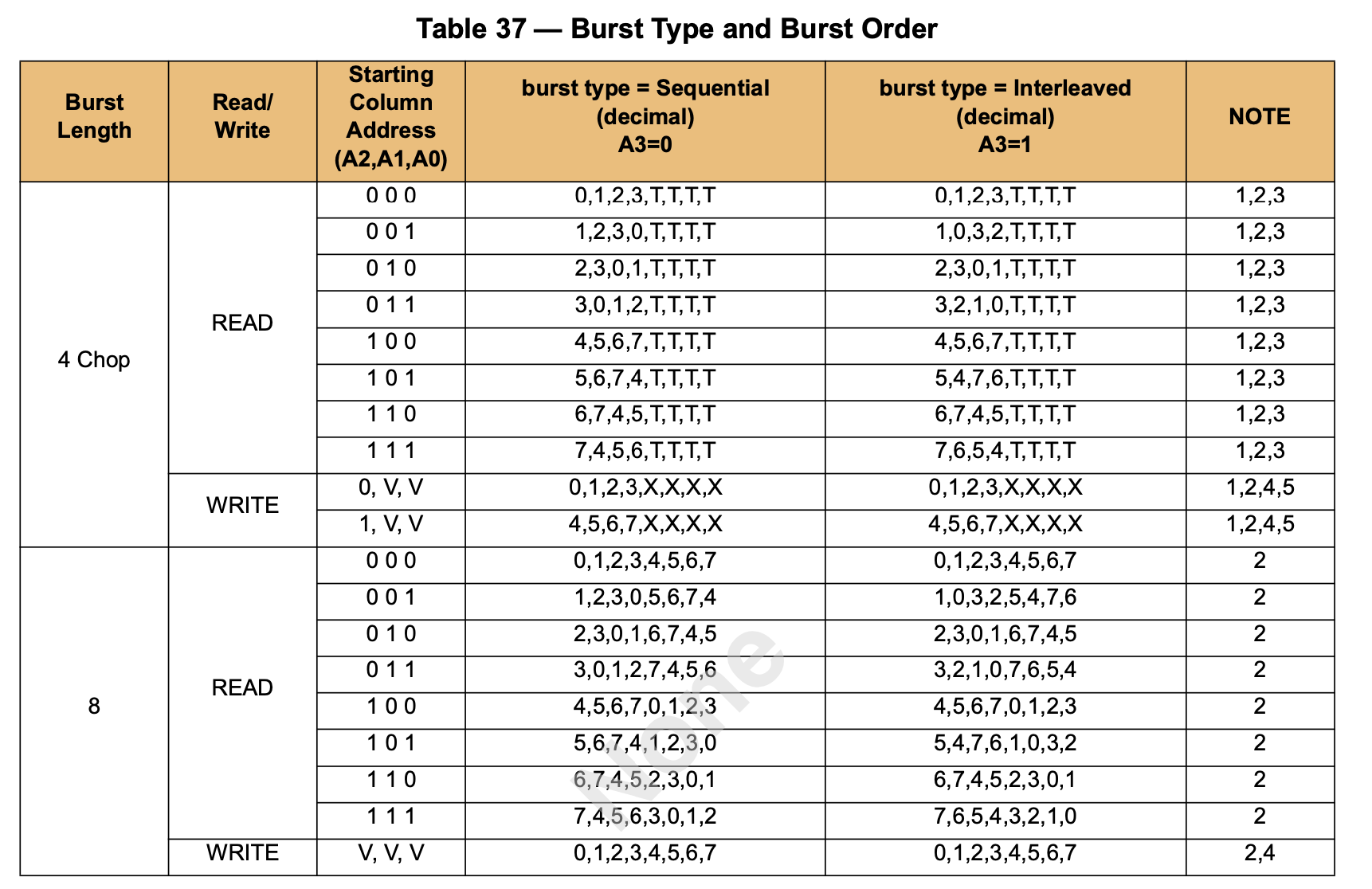
每个 row 有 1024 个 column,所以 column 地址就有 10 位。但实际上,因为 Burst Length 是 8,所以实际上高 7 位(对应 128 x 64 的 128)会选择出 8 个 column,低 3 位决定了这些 column 的传输顺序,这是为了方便缓存 refill 的优化,把要读取的部分先取出来:
Prefetch
SDRAM 有 Prefetch 的概念,含义就是一次读取会取出位宽的多少倍的数据出来。例如上面的 1 Gig x 8 的 SDRAM,其 I/O 数据位宽是 8 位(见右侧的 DQ 信号)。但实际上从 Global I/O Gating 出来的数据是 64 位,差了一个 8 的因子,这就是 DDR4 的 8n Prefetch。这是因为,DDR4 SDRAM 的 IO 频率是很高的,例如 3200 MT/s 对应的 I/O 时钟频率是 1600 MHz,而实际的 Memory array 频率做不到这么高,而是工作在 400 MHz,为了弥补频率的差距,一次读取 8 倍位宽的数据。体现在 I/O 上就是一次读操作得到 8 份数据,也就是 Burst Length 为 8,通过 DDR 方式在四个时钟周期内传输。
有趣的是,DDR4 内存条位宽是 64,那么一次读操作就得到 \(64 * 8 / 8 = 64B\) 的数据,正好是很多 CPU 缓存行的大小。
DDR5 把 Prefetch 提高到了 16n,这也就是为什么看到的 DDR5 的数据速率数字大了很多:同样的 Memory array 频率下,DDR4 的 Prefetch 是 8n,DDR5 的 Prefetch 是 16n,于是 I/O 频率翻倍,数据速率也翻倍。同时为了继续保持一个 Burst 是 64 字节,DDR5 内存条每个 channel 位宽是 32 位,每个内存条提供两个 channel。
访问模式
SDRAM 的访问模式比较特别,它的 Memory array 每次只能以整个 row 为单位进行存取。在前面的例子(1 Gig x 8)中,一个 row 有 8192 位的数据,但是一次读或写操作只涉及 64 位的数据,因此一次读操作需要:
- 第一步,先把数据所在的整个 row 取出来
- 第二步,在 row 里读出想要的数据
但是每个 Bank 同时只能取出来一个 row,所以如果两次读涉及到了不同的 row,那么需要:
- 第一步,先把第一次读的数据所在的整个 row 取出来
- 第二步,在 row 里读出想要的数据
- 第三步,把第一次读的 row 放回去
- 第四步,把第二次读的数据所在的整个 row 取出来
- 第五步,在 row 里读出想要的数据
用 SDRAM 的术语来讲,第一步和第四步叫做 Activate,第二部和第五步叫做 Read,第三步叫做 Precharge。
SDRAM 定义了下列的时序参数,描述了这三个操作之间的时序要求:
- CL(CAS Latency):发送读请求,到输出第一个数据的时间
- RCD(ACT to internal read or write delay time):从 Activate 到下一个读或写请求的时间
- RP(RRE command period):发送 Precharge 命令到下一个命令的时间
- RAS(ACT to PRE command period):从 Activate 到 Precharge 之间的时间
- RC(ACT to ACT or REF command period):从 Activate 到下一个 Activate 或者 Refresh 之间的时间
- RTP(Internal READ Command to PRECHARGE command delay):从 Read 到 Precharge 之间的时间
于是上面的流程需要的时间要求就是:
- 第一步,Activate,取出第一个 row
- 第二步,Read,第一步和第二步之间要隔 RCD 的时间,从 Read 发送地址到得到数据要等待 CL 的时间
- 第三步,Precharge,第一步和第三步之间要隔 RAS 的时间,第二步和第三步之间要隔 RTP 的时间
- 第四步,Activate,取出第二个 row,第一步和第四步之间要隔 RC 的时间,第三步和第四步之间要隔 RP 的时间
- 第五步,Read,第四步和第五步之间要隔 RCD 的时间,从 Read 发送地址到得到数据要等待 CL 的时间
根据这个流程,可以得到以下的结论:
- 访问带有局部性的数据性能会更好,只需要连续地进行 Read,减少 Activate 和 Precharge 次数
- 不断访问不同的 row 的数据,会导致需要来回地 Activate,Read,Precharge 循环
- 访问 row 和访问 row 中的数据分成两个阶段,两个阶段可以使用同样的地址信号,使得内存总容量很大
- 而如果访问总是命中同一个 row,就不需要 Activate 和 Prechage,可以持续 Read,获得接近理论的传输速率,如图:
为了缓解第二点带来的性能损失,引入了 Bank 的概念:每个 Bank 都可以取出来一个 row,那么如果要访问不同 Bank 里的数据,在第一个 Bank 进行 Activate/Precharge 的时候,其他 Bank 可以进行其他操作,从而掩盖 row 未命中带来的性能损失。
Bank Group
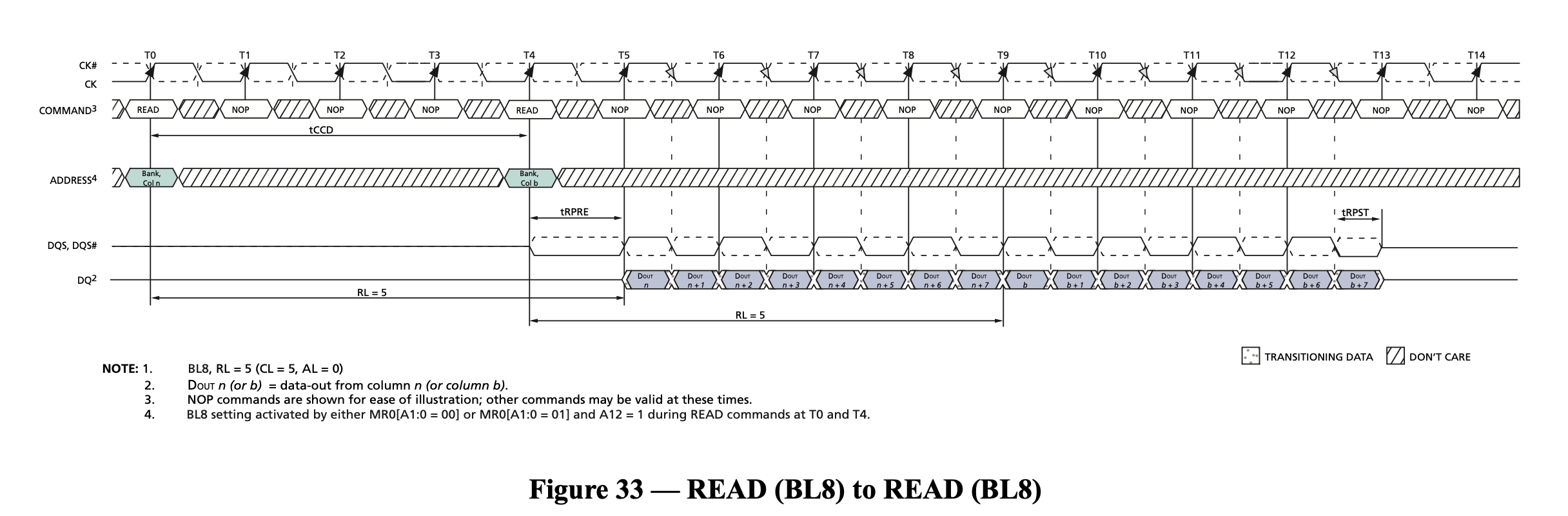
DDR4 相比 DDR3 引入了 Bank Group 的概念。引用 同一 bank group page hit 的时间是 tccd_S 还是 tccd_L? - Ricky Li 的回答 - 知乎 和 DDR4 为何会引入 tCCD_L 和 tCCD_S 的观点:DDR4 的 Memory array 频率相比 DDR3 提高,因此在 I/O Gating 上,即使命中了 Row,即使用了多个属于同一个 I/O Gating 的 Bank,也无法实现完美的连续读取,即两个相邻的读操作需要隔 5 个周期,而每次读传输 4 个周期的数据,利用率最高 80%,见下图:
为了解决这个瓶颈,DDR4 在核心部分的区别就是多了一个 Global I/O gating,并且每个 Bank Group 都有自己的 I/O gating, DM mask logic,下面分别画出 DDR3 和 DDR4 的存储部分,进行对比:
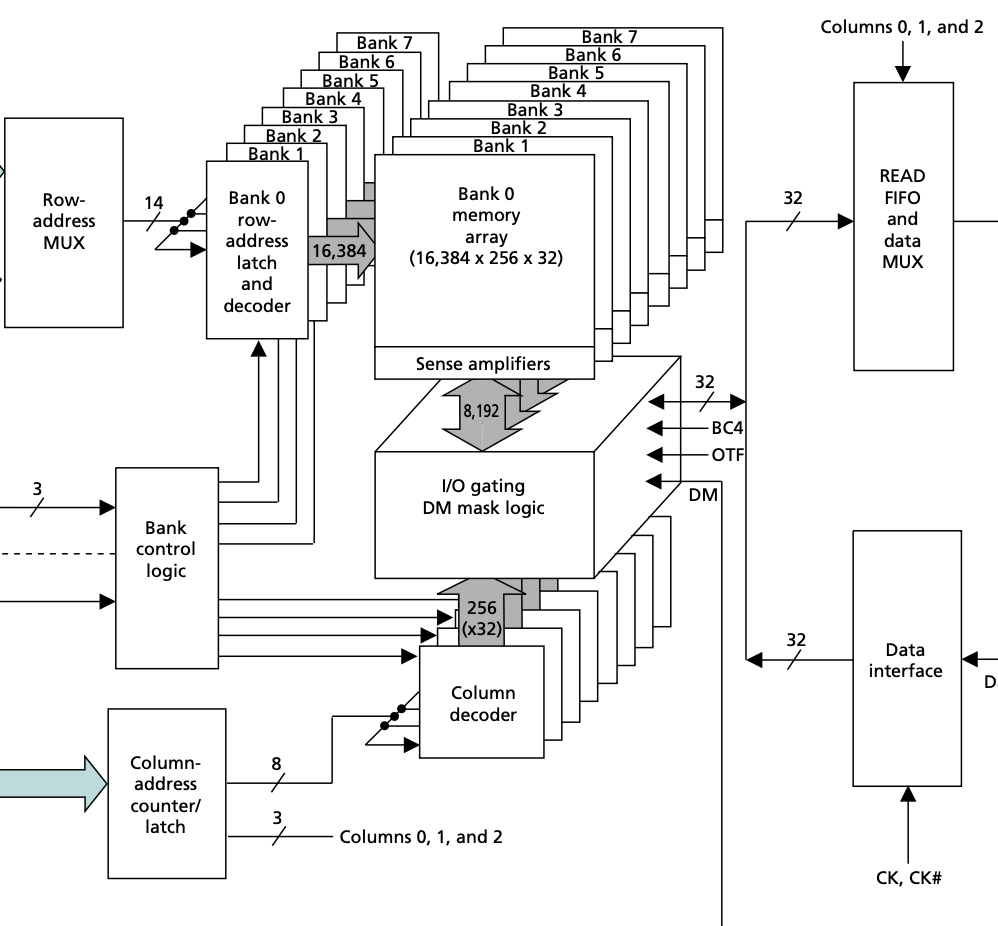
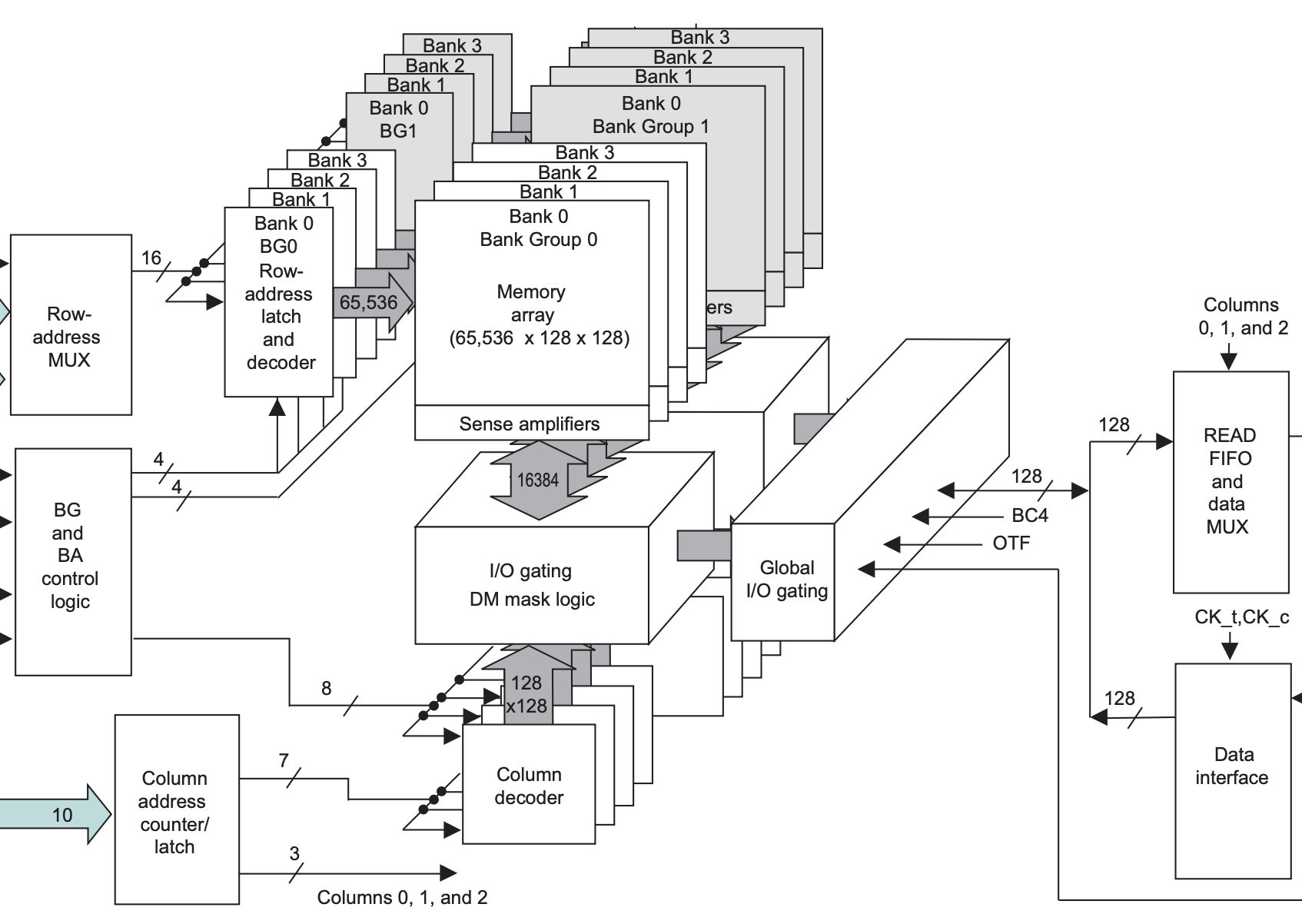
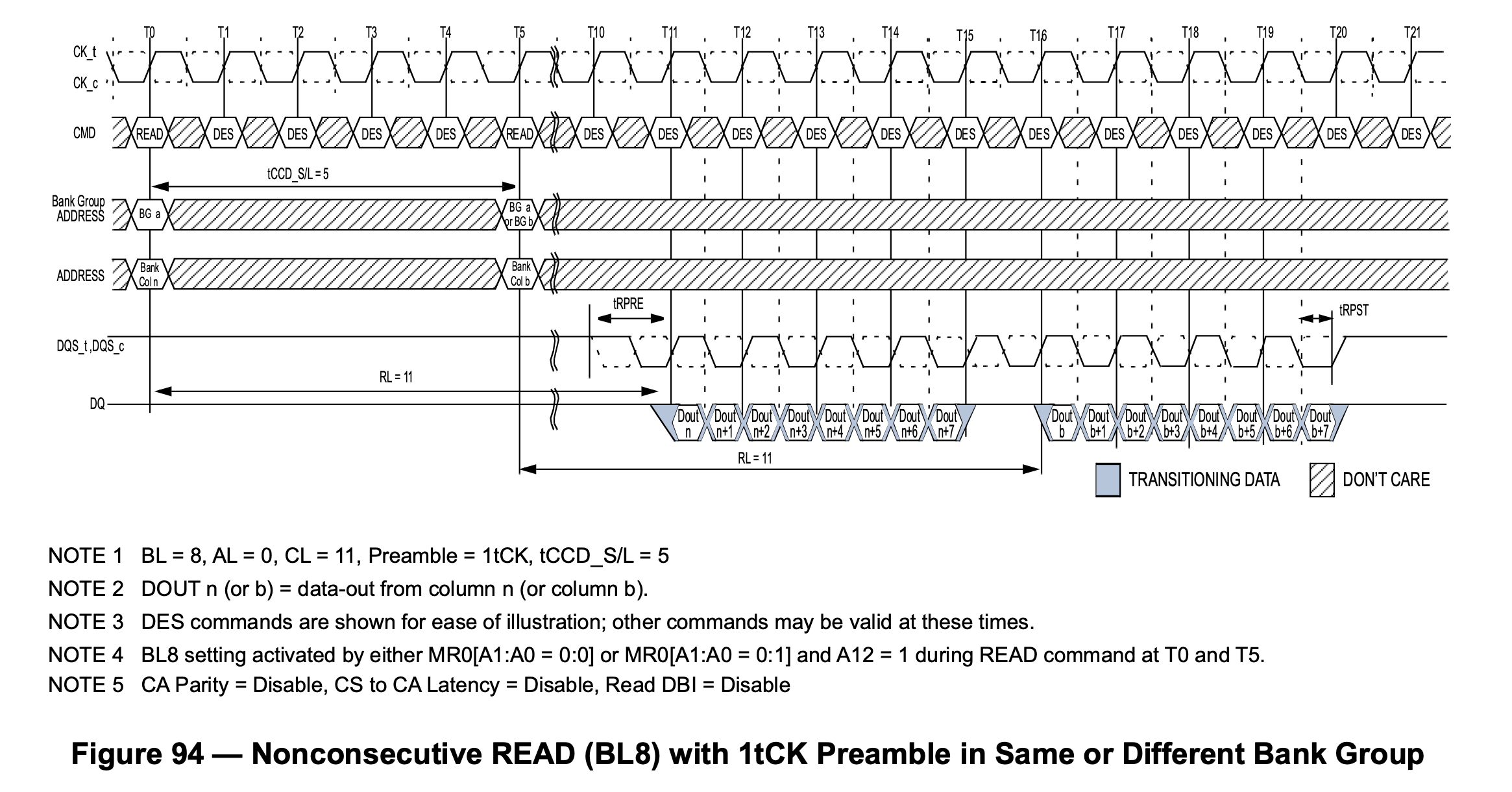
每个 Bank Group 有自己的 I/O Gating 以后,DDR4 下可以多个 Bank Group 同时进行读操作,并且流水线式输出,例如第一个 Bank Group 读取了数据,在 I/O 上用四个周期传输完数据,立马第二个 Bank Group 读取的数据就接上了,又传输了四个周期的数据,波形如下图:
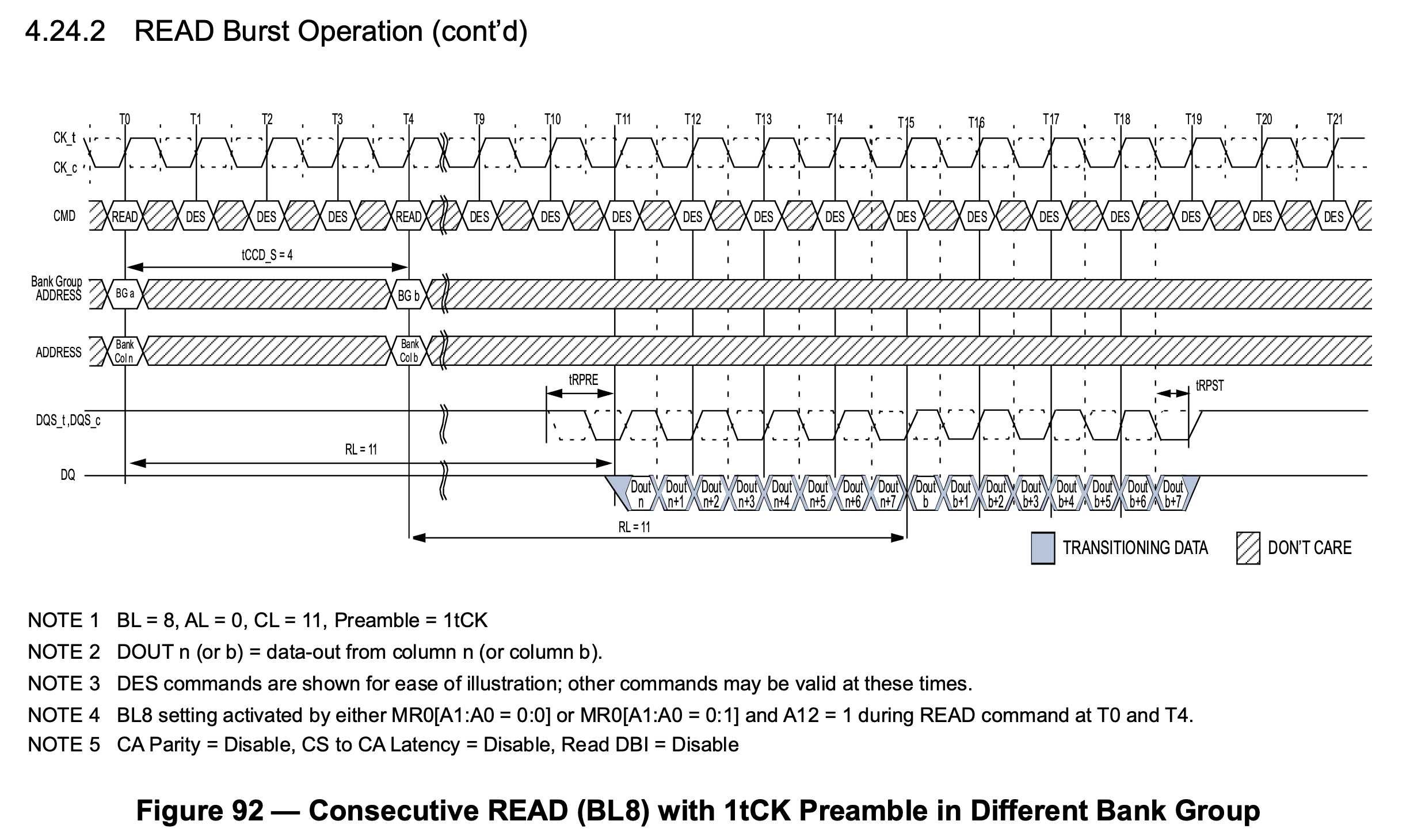
上图中 T0 时刻发起第一个读请求,T4 时刻发起第二个请求,T11-T15 得到第一个请求的数据,紧接着 T15-T19 得到第二个请求的数据。这样就解决了频率提高带来的问题。
存储层次
上面已经提到,在 DDR SDRAM 内部的层次从大到小有:
- Bank Group:DDR4 引入,通过 Bank Group 掩盖 DDR4 同一个 Bank Group 内连续读的延迟 tCCD_L
- Bank:每个 Bank 同时只有一个 Row 被激活,通过多个 Bank 掩盖 Activate/Precharge 的延迟
- Row:Activate/Precharge 的单位
- Column:每个 Column 保存 n 个 Cell,n 是 SDRAM 的位宽
- Cell:每个 Cell 保存 1 bit 的数据
实际上,SDRAM 外部还有一些层次:
- Channel:处理器的内存控制器的通道数量
- Module:内存条,可以有多个内存条连接到同一个 Channel 上
- Rank:多个 DDR SDRAM 芯片在宽度上拼接起来,一个 Module 上可以放下一到四个 Rank,这些 Rank 共享总线,每个 Rank 都有自己的片选信号 CS_n,实际上就是在深度上拼接 SDRAM 芯片
- Chip:也就是一个 DDR SDRAM 芯片,例如一个数据位宽是 64 位的 Rank,是使用 8 个 x8 的 Chip 在宽度上拼接而成
可以看到,相邻存储层次之间都差一个二的幂次的倍数,因此从内存地址到这些存储层次的映射,就是截取地址中的不同区间,每个区间对应了一个层次的下标。这也就是为什么内存大小的 MB、GB 用的是 1024 进制。
如果研究 SDRAM 内存控制器,比如 Xilinx FPGA 上的 MIG,可以发现它可以配置不同的地址映射方式,例如:
- ROW_COLUMN_BANK
- ROW_BANK_COLUMN
- BANK_ROW_COLUMN
- ROW_COLUMN_LRANK_BANK
- ROW_LRANK_COLUMN_BANK
- ROW_COLUMN_BANK_INTLV
就是将地址的不同部分映射到 DRAM 的几个地址:Row,Column,Bank。可以想象,不同的地址映射方式针对不同的访存模式会有不同的性能。对于连续的内存访问,ROW_COLUMN_BANK 方式是比较适合的,因为连续的访问会分布到不同的 Bank 上,这样可以比较好地掩盖 Activate/Precharge 延迟,性能就会更好。
以 DRAMSim3 为例,它可以用类似 rochrababgco 的语法表示从地址到 DRAM 各级地址的映射,从高位到低位,以它的 DDR4_8Gb_x8_3200.ini 配置为例:
ro=addr[33:18]:Row 地址,共 65536 个 Rowch=0:Channel 地址,共 1 个 Channelra=addr[17:17]:Rank 地址,共 2 个 Rankba=addr[16:15]:Bank 地址,每个 Bank Group 内有 4 个 Bankbg=addr[14:13]:Bank Group 地址,共 4 个 Bank Groupco=addr[12:6]:Column 地址,共 1024 个 Column,每 8 个 Column 为一个 Burst
时序参数
下面列出 DDR4 的主要时序参数:
- tCCD_S: 对不同 Bank Group 进行 CAS 时,CAS 到 CAS 的延迟(CAS to CAS delay short),如 4 周期
- tCCD_L: 对相同 Bank Group 进行 CAS 时,CAS 到 CAS 的延迟(CAS to CAS delay long),如 6 周期
- tRRD_S: 对不同 Bank Group 进行 ACTIVATE 时,ACT 到 ACT 的延迟(ACT to ACT delay short),如 4 周期
- tRRD_L: 对相同 Bank Group 进行 ACTIVATE 时,ACT 到 ACT 的延迟(ACT to ACT delay long),如 6 周期
- tWTR_S:对不同 Bank Group 先 WRITE 后 READ 时,WRITE 完成写入(最后一个数据写入完成)到 READ 的延迟(Write to Read short)
- tWTR_L:对相同 Bank Group 先 WRITE 后 READ 时,WRITE 完成写入(最后一个数据写入完成)到 READ 的延迟(Write to Read long)
- tREFI:内存控制器需要按照 tREFI 的间隔发送 REFRESH 命令(Refresh Interval)
- tRFC:REFRESH 命令到 REFRESH/ACTIVATE 的最小间隔(Refresh Cycle)
- tFAW: 在连续的 FAW 时间内,最多发送四个 ACTIVATE 命令(Four Activate Window),换句话说,第 i 次 ACTIVATE 和第 i+4 次 ACTIVATE 至少间隔 tFAW 时间
- tRP:PRECHARGE 命令发送以后,到对同一个 Bank 的下一个命令的延迟(Precharge)
- tRTP:对同一个 Bank 的 READ 到 PRE 的最小间隔(Read to Precharge)
- tRAS:对同一个 Bank 的 ACT 到 PRE 的最小间隔(RAS active time,Activate to Precharge)
- tRCD:对同一个 Bank 的 ACT 到 READ/WRITE 的最小间隔(Activate to Read/Write delay)
- tRC:对同一个 Bank 的 ACT 到 ACT/PRE 的最小间隔(Activate to Activate/Precharge delay)
- CL:CAS Latency,用于计算 Read Latency
- CWL:CAS Write Latency,用于计算 Write Latency
- AL:Additive Latency,用于计算 Read Latency
- RL:Read Latency
- WL:Write Latency
Additive Latency 看似人为增加了命令的延迟,但实际上,内存控制器也会提前 AL 个周期去发送命令。例如,设置 AL 以后,可以连续发送 ACT 和 READ 命令,通过 AL 使得 READ 命令延迟生效,以满足 tRCD 时序要求,同时命令总线上空闲了出来。
接口
下面画出了 DDR3 和 DDR4 的引脚:
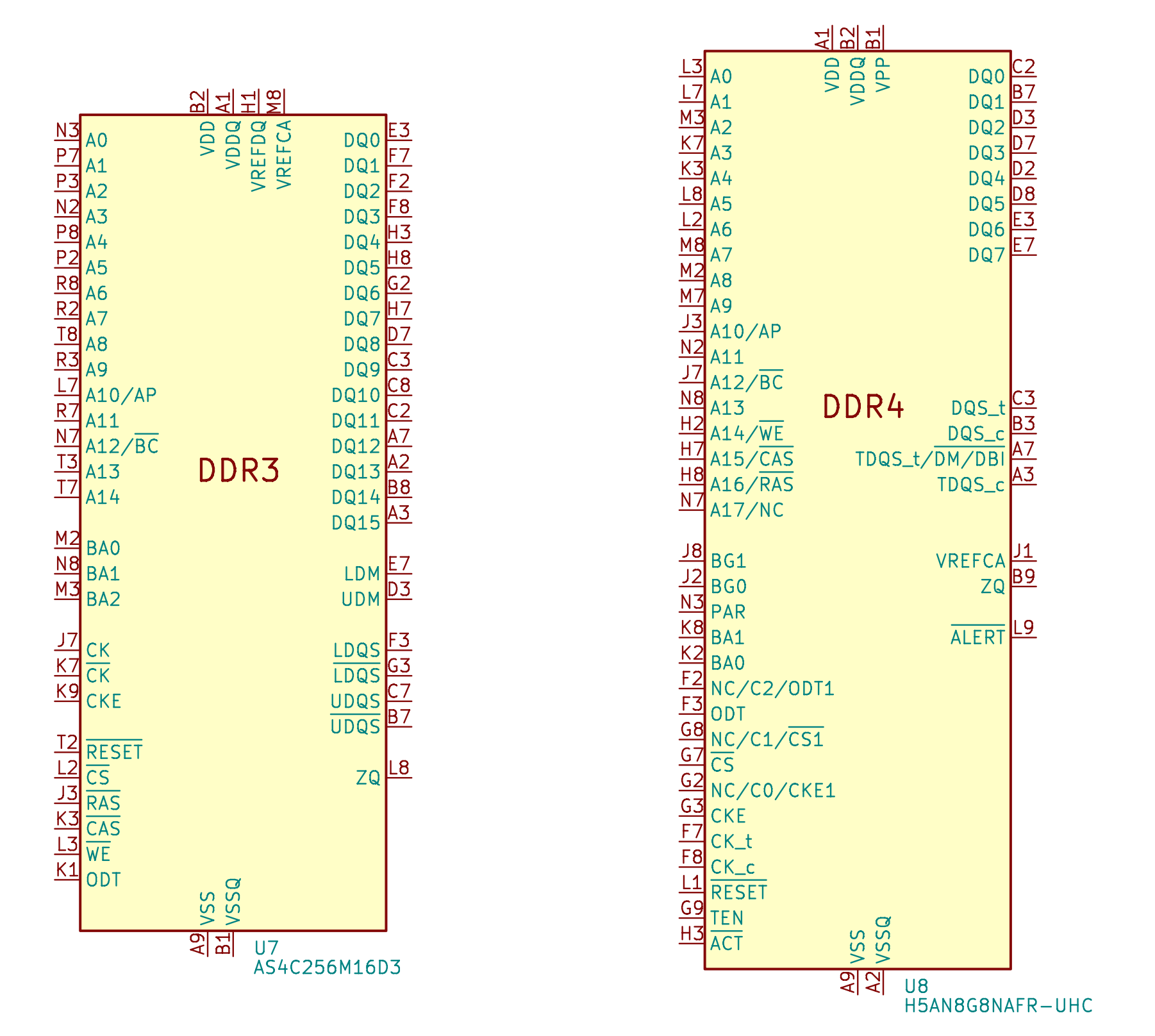
DDR3 和 DDR4 的不同点:
- 地址信号:DDR3 是 A0-A14,DDR4 是 A0-A17,其中 A14-A16 复用了引脚
- DDR4 引入了 Bank Group,所以多出了 BG0-BG1 引脚作为 Bank Group 地址
- DDR4 引入了 Bank Group 后,总 Bank 数量是 \(4*4=16\);DDR3 的 Bank 数量是 8
- DDR3 中的 RAS_n、CAS_n 和 WE_n 在 DDR4 中被复用为了 A14-A16,目的是更大的容量
- DDR4 额外添加了 ACT_n 控制信号
拓扑
为了获得更大的位宽,在内存条上可以看到很多个 SDRAM 芯片,通过宽度拼接的方式形成一个 64 位的数据宽度。此时从 PCB 走线的角度来讲,数据线直接连接到各个 SDRAM 芯片上,可以相对容易地连接;但是其他信号,比如地址信号和控制信号,需要连接到所有 SDRAM 芯片上,在局限的空间里,如果要保证到各个 SDRAM 芯片的距离相等,同时保证信号完整性是很困难的。
Fly-by topology
因此,实际上地址和控制信号是采用了串联的方式连接(Fly-by topology),也就是下图的右边的连接方式:
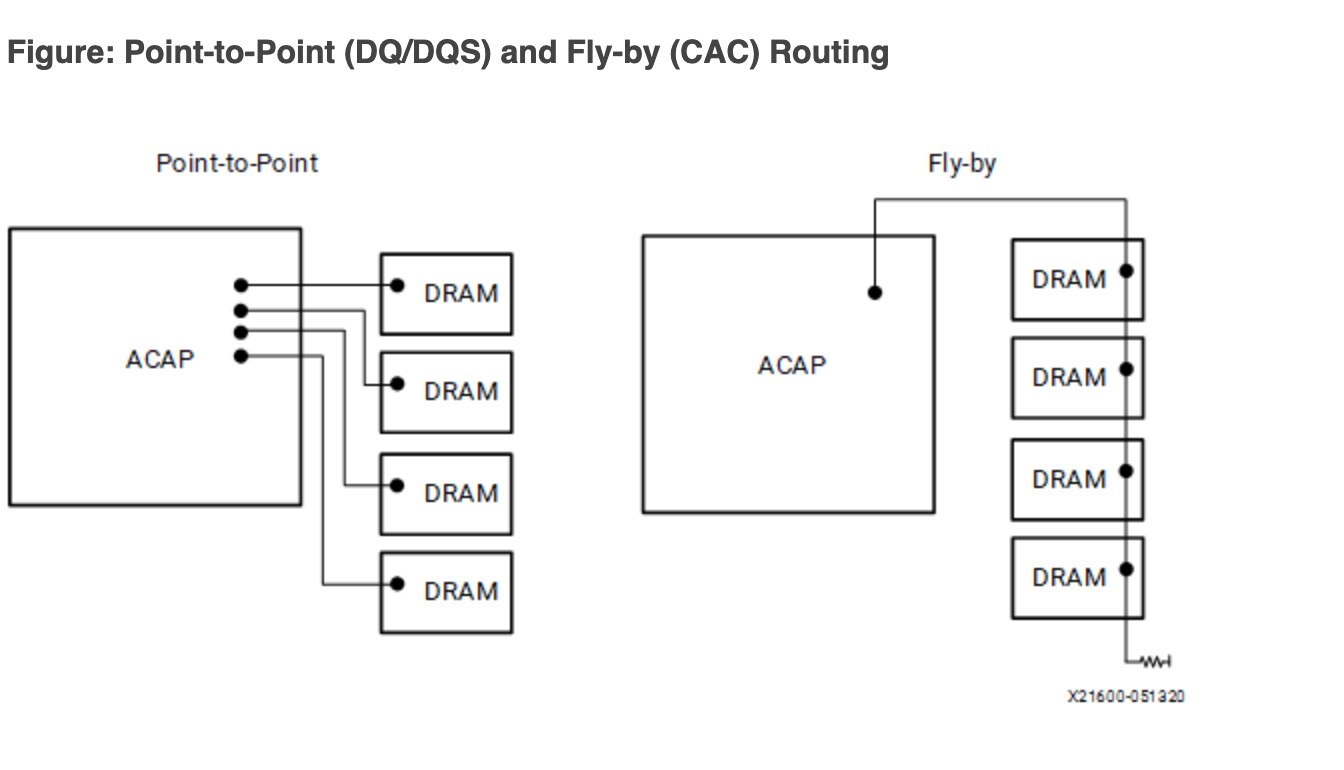
但是数据信号(DQ、DQS 和 DM)依然是并行点对点连接到 SDRAM 上的(上图左侧)。这就出现了问题:不同的 SDRAM 芯片,数据和时钟的偏差不同,数据可能差不多时间到,但是时钟的延迟越来越大:
为了让处于不同位置的 SDRAM 看到同样的波形,需要在内存控制器一侧给数据信号加上可变的延迟,这个延迟需要经过校准,才能知道是多少。
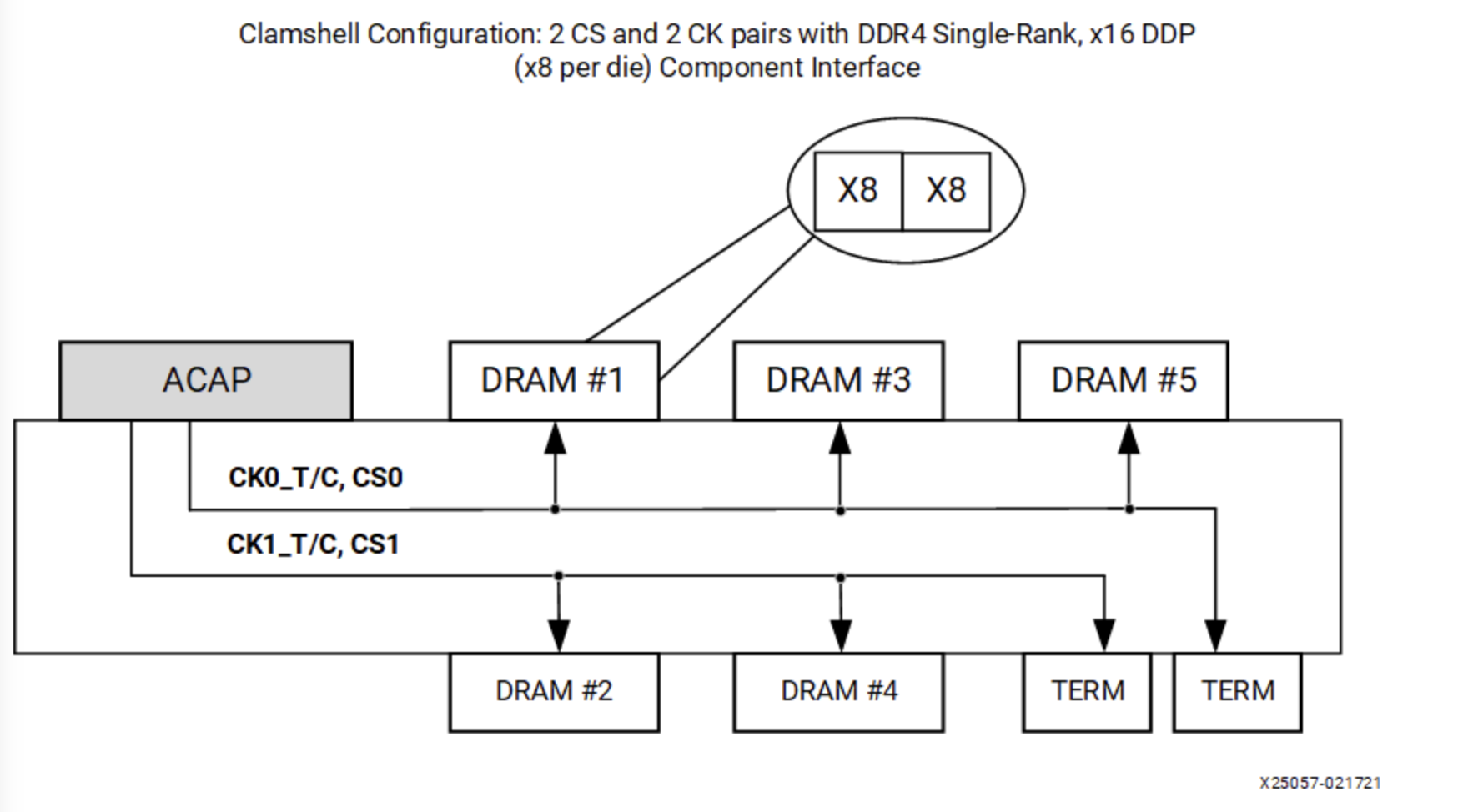
Clam-shell topology
除了 Fly-by topology,在一些场景下,为了节省 PCB 面积,还可能会使用 Clam-shell topology。Clam-shell 是贝壳的意思,贝壳有上下两个部分合在一起,所以其实 Clam-shell topology 就是形象地表示在 PCB 的正面和背面都有 SDRAM 芯片的情形:
这种设计利用了 PCB 背面的空间,但是同时也带来了新的问题:直观地讲,如果两个芯片都放在 PCB 的正面,要连线的话,保证引脚顺序接近一致,就可以比较容易地连接,不会有很多交叉的地方。但如果一个在正面,另一个在背面,引脚的顺序就倒转过来了,连线的时候就比较困难。
解决的办法是,修改引脚的顺序,把一些引脚的功能进行对调,使得走线更加简单:
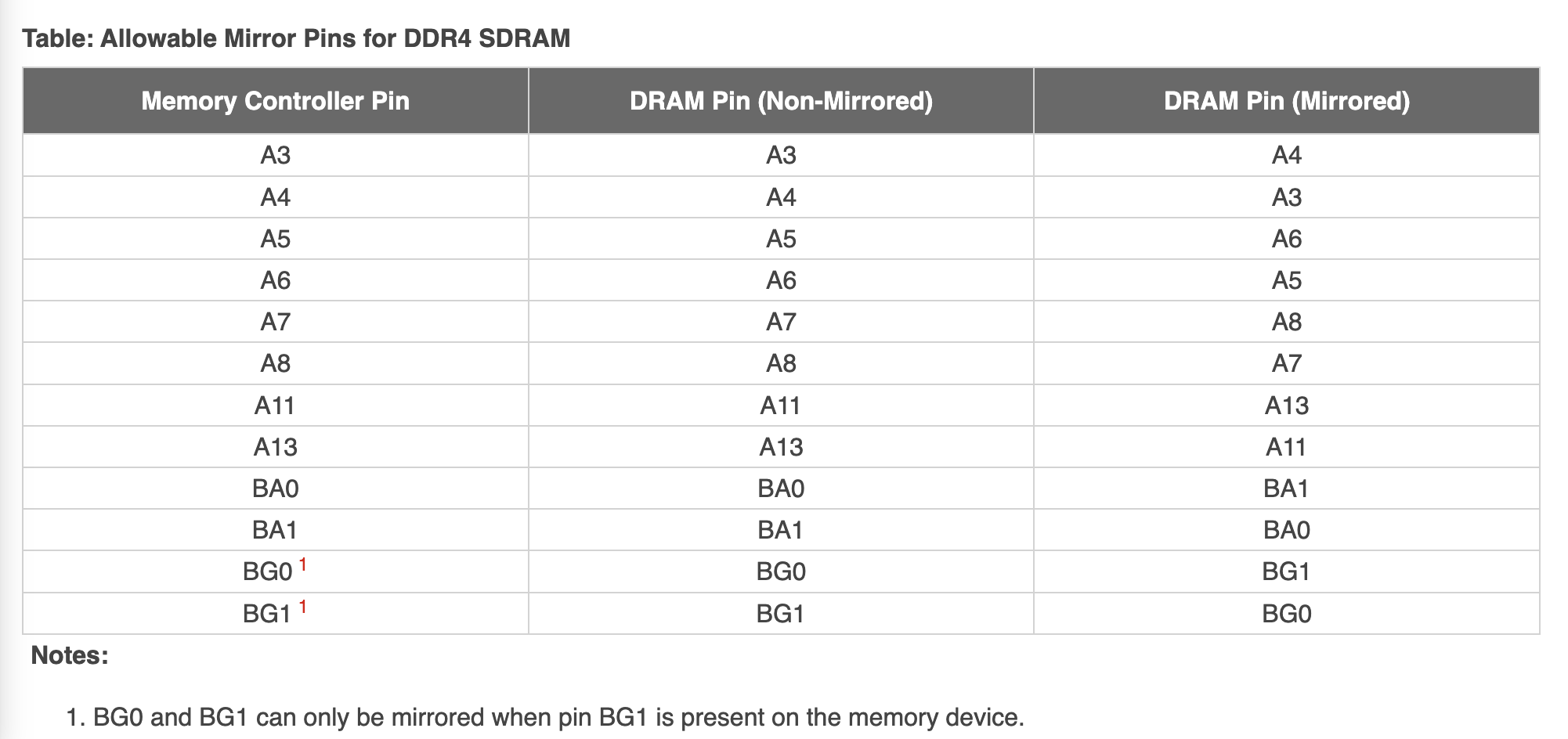
表格中特意挑选了一些不影响特殊功能的引脚来交换,使得大部分功能,即使交换了引脚,也可以正常工作。例如 Row 地址交换了几个位,虽然物理上保存的地方变了,但是不影响读写数据。但是,对于 Mode Register Set 操作,必须要内存控制器自行交换位的顺序,在 PCB 上连接时再交换回来,才能保证在 SDRAM 一侧得到正确的结果。
此外,Clam-shell Topology 的正面和背面各有一个 cs_n 片选信号,但是这和 Dual Rank 不同:Dual Rank 是正面和背面都有同样数量的 DRAM 芯片,共享地址信号、数据信号和控制信号,总线上同一时间只有一侧的 DRAM 芯片在使用,好处是内存容量翻倍,并且两个 rank 可以互相掩盖延迟;而 Clam Shell Topology 的两个 cs_n 是为了给 Mode Register Set 操作指定正面或背面,而其余的大部分操作,可以正面和背面同时工作,因为它们的数据信号并没有共享。
校准
SDRAM 校准,或者说 SDRAM 训练,主要有如下几个步骤:
- Write Leveling
- Read Leveling
Write Leveling
Write Leveling 要解决的是 Fly-by Topology 带来的延迟不一致,导致 SDRAM 看到错误的信号的问题。具体地讲,Write Leveling 的目的是让 SDRAM 芯片接受到的 DQS 信号与 CK 信号同步:
为了达到这个目的,思路就是不断调整 DQS 输出的延迟,观测不同延迟下的行为,找到一个 DQS 与 CK 同步的延迟值。为了配合内存控制器做 Write Leveling,SDRAM 可以进入一个 Write Leveling Mode,在这个状态下,SDRAM 会在 DQS 的上升沿对 CK 进行采样,然后把结果输出到 DQ 上。此时,不同的 DQS 延迟就会带来不同的结果:
上图中 delay0 和 delay1 两种情况下,DQS 采样到了 CK 的负半周期,而 delay2 和 delay3 时 DQS 采样到了 CK 的正半周期,所以如果想要让 DQS 和 CK 同步,应该把 DQS 延迟设置在 delay1 和 delay2 之间。
总结一下 Write Leveling 的算法:
- 设置 SDRAM 进入 Write Leveling 模式,此时 SDRAM 会使用 DQS 对 CK 采用,把结果输出到 DQ
- 控制器枚举 DQS 的延迟,读取出每个 DQS 延迟下的 DQ 结果,得到一个 0-1 串,例如:
001111111111111111110000,即随着延迟增大,先采样到 0,再采样到 1,最后又采样到 0 - 找到一个 DQS 延迟,使得 DQ 出现一个从 0 到 1 的变化,那么按照这个延迟输出,DQS 就会与 CK 同步
- 设置 SDRAM 结束 Write Leveling 模式
这个过程要对每个 DQS 信号分别进行。下面以 litex 的 SDRAM 校准代码为例,用 C 代码实现简化的流程:
Read Leveling
在 Write Leveling 阶段,解决了 SDRAM 处信号的同步问题。但是对于读操作,数据是从 SDRAM 发送给控制器,不同的数据到达控制器的时间可能也不同,因此也需要对读操作进行校准。
为了判断读取的数据是否正确,做法是首先写入已知的数据,然后再读出来,如果读取的数据和写入的数据完全一致,就说明可以正确地进行读操作。
实现思路和 Write Leveling 类似,也是枚举延迟,进行一些操作,观察每个延迟下的输出:
- 写入数据(或者用 SDRAM 的生成固定 Pattern 输出的功能)
- 设置延迟从 0 开始循环,不断增大
- 在每个延迟的设定下,读取出数据,把读取的结果与之前写入的数据进行比较
- 统计出哪些延迟条件下,读取数据是准确的,准确的记为 1,不准确的记为 0
- 找到表示准确的 1 的范围,取中点作为最终的校准结果
注意这里不再是找到 0-1 的变化的地方,Write Leveling 找 0-1 变化是为了同步,同步的地方正是 0-1 变化的地方;而 Read Leveling 的目的是要读取出正确的数据,已知有一段连续的延迟区间,区间内都可以读出正确的数据,那么取其中点,即使因为温度等条件变化,区间出现移动,因为保留了足够的余量,所以依然可以工作。取中点这一步也称为 Read Centering。
HBM
HBM 全称是 High Bandwidth Memory,也就是高带宽内存,其技术也是基于 SDRAM,因此放在这里和 DDR SDRAM 进行对比。
HBM 相比前面的 DDR SDRAM,它堆叠了多个 SDRAM,提供多个 channel 并且提高了位宽。例如 Micron HBM with ECC,堆叠了 4/8 层 DRAM,提供了 8 个 channel,每个 channel 的数据宽度是 128 位,以 3200 MT/s 计算,一个 HBM 芯片的数据传输速率最大是:
所以一片 HBM 的传输速率就相当于 16 个传统的 DDR SDRAM,靠的是 8 个 Channel 以及双倍的位宽。每个 Channel 的位宽是 128 位,实际上可以认为是把两片 64-bit SDRAM 并起来了,可以当成一个 128 位的用,也可以在 Pseudo Channel 模式下,当成共享地址和命令信号的两个 SDRAM 用。
当然了,HBM 的高带宽的代价就是引脚数量很多。根据 HBM3 JESD238A 标准,每个 Channel 要 120 个 pin,一共 16 个 channel(HBM2 是 8 channel,每个 channel 128 位;HBM3 是 16 channel,每个 channel 64 位),加上其余的 52 个 pin,这些加起来就 1972 个 pin 了。所以一般在 Silicon Interposer 上与处理器连接,而不是传统的在 PCB 上走线:
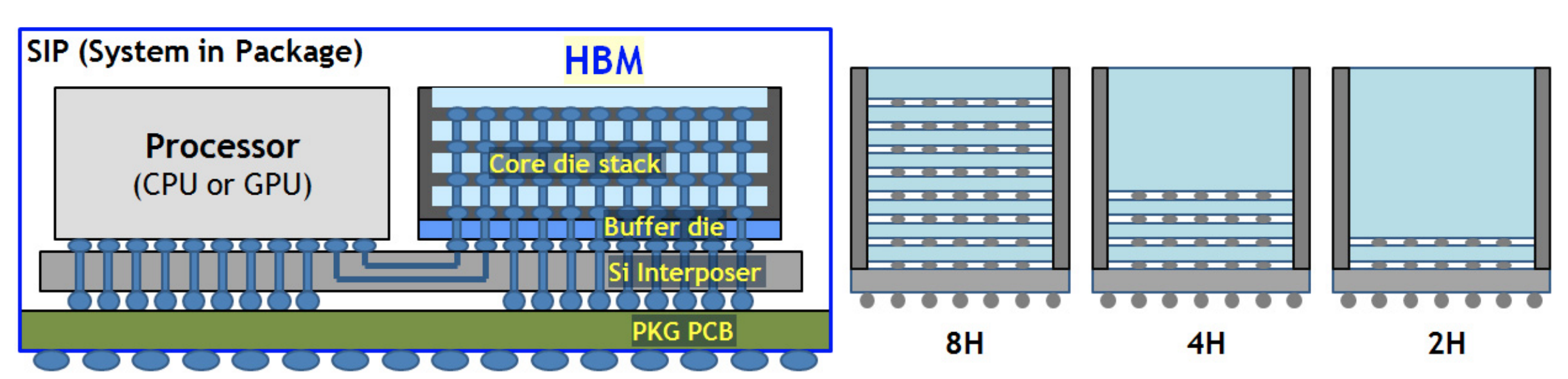
所以在 HBM3 标准里,用 Microbump 来描述 HBM 的 pin。可以形象地理解为,把原来插在主板上的内存条拆开,只保留芯片,把芯片竖直堆叠起来,变成一个 HBM Die,然后紧密地连接到 CPU 中。但是另一方面,密度上去了,价格也更贵了。同时扩展性也下降了,不能像 DDR SDRAM 那样在主板上插很多条。
下面来分析一些典型的带有 HBM 的系统的内存带宽:
Xilinx 的 Virtex Ultrascale Plus HBM FPGA 提供了 \(1800 \mathrm{(MT/s)} * 128 \mathrm{(bits/transfer)} * 8 \mathrm{(Channels)} = 230.4 \mathrm{(GB/s)}\) 的带宽,如果用了两片 HBM 就是 460.8 GB/s。暴露给 FPGA 逻辑的是 16 个 256 位的 AXI3 端口,AXI 频率 450 MHz,内存频率 900 MHz。可以看到,每个 AXI3 就对应了一个 HBM 的 pseudo channel。每个 pseudo channel 是 64 位,但是 AXI 端口是 256 位,这是因为在速率不变的情况下,从 450MHz 到 900MHz,再加上 DDR,等价于频率翻了四倍,所以位宽也要相应地从 64 位翻四倍到 256 位。
A100 显卡 40GB PCIe 版本采用了 5 个 8 GB 的 HBM 内存,运行在 1215 MHz 的频率下,那么内存带宽就是 \(1215 \mathrm{(MHz)} * 2 \mathrm{(DDR)} * 8 \mathrm{(channels)} * 128 \mathrm{(bits/transfer)} / 8 \mathrm{(bits/byte)} * 5 \mathrm{(HBM)} = 1555 \mathrm{(GB/s)}\),与 Datasheet 吻合。A100 Datasheet 中的 Memory bus width 的计算方式其实就是把所有的 Channel 位宽加起来:\(128 \mathrm{(bits/transfer)} * 8 \mathrm{(channels)} * 5 \mathrm{(stacks)} = 5120 \mathrm{(bits)}\)。
A100 显卡 80GB PCIe 版本把 HBM2 升级到了 HBM2e,同时内存时钟频率也升级到了 1512 MHz,此时内存带宽就是 \(1512 \mathrm{(MHz)} * 2 \mathrm{(DDR)} * 8 \mathrm{(channels)} * 128 \mathrm{(bits/transfer)} / 8 \mathrm{(bits/byte)} * 5 \mathrm{(HBM)} = 1935 \mathrm{(GB/s)}\),与 Datasheet 吻合。
H100 显卡 80GB SXM5 版本把 HBM 升级到了 HBM3,内存容量依然是 80GB,但是时钟频率提高到了 2619 MHz,此时,内存带宽是 \(2619 \mathrm{(MHz)} * 2 \mathrm{(DDR)} * 8 \mathrm{(channels)} * 128 \mathrm{(bits/transfer)} / 8 \mathrm{(bits/byte)} * 5 \mathrm{(HBM)} = 3352 \mathrm{(GB/s)}\)。
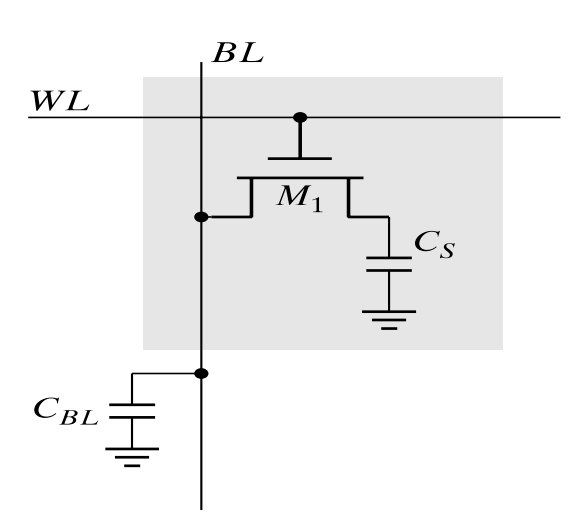
DRAM Cell
DRAM 的数据存储在电容中。典型的 1T DRAM Cell 内部构造如下:
几种 DDR 的对比
下面给出 DDR,LPDDR,GDDR 和 HBM 的对比:
| DDR4 | DDR5 | LPDDR4 | LPDDR5 | GDDR5 | GDDR6 | HBM2 | |
|---|---|---|---|---|---|---|---|
| Channel 数量 | 1 | 2 | 2 | 2 | 2 | 2 | 8 |
| 每 Channel 位宽 | 64 | 32 | 16 | 16/32 | 16 | 16 | 128 |
| 数据速率(MT/s) | 3200 | 5600 | 4266 | 6400 | 9000 | 24000 | 2400 |
| 总带宽(GB/s) | 25.6 GB/s | 44.8 GB/s | 17.1 GB/s | 25.6 GB/s | 36 GB/s | 96 GB/s | 307 GB/s |
数据速率按照能查到的型号的最高性能:
- DDR4: Micron 3200 MT/s
- DDR5: Micron 5600 MT/s
- LPDDR4: Samsung 4266 MT/s
- LPDDR5: Samsung 6400 MT/s
- GDDR5: Samsung 9000 MT/s
- GDDR6: Samsung 24000 MT/s
- HBM2: Samsung 2400 MT/s
- HBM2E: Micron 3200 MT/s
UDIMM/RDIMM/LRDIMM
具体到 DIMM,又有不同的类型:
- UDIMM(Unbuffered DIMM): 没有额外的寄存器打拍
- RDIMM(Registered DIMM): 对地址、命令和时钟信号加寄存器打拍,数据信号不加寄存器
- LRDIMM(Load Reduced DIMM): 在 RDIMM 的基础上,给数据信号也加上寄存器
- CUDIMM(Clock Unbuferred DIMM): 在 DIMM 上添加 clock driver (CKD),目标是更高的频率
- SODIMM(Small Outline DIMM): 一般用于笔记本,面积小
- CSODIMM(Clocked Small Outline DIMM): 在 SODIMM 上添加 clock driver (CKD),频率更高
随着寄存器的增加,延迟增加,但是也能达到更高的频率,更大的容量。为了进一步实现更高的频率,就要引入 CKD,保证高频率下时钟信号的质量。
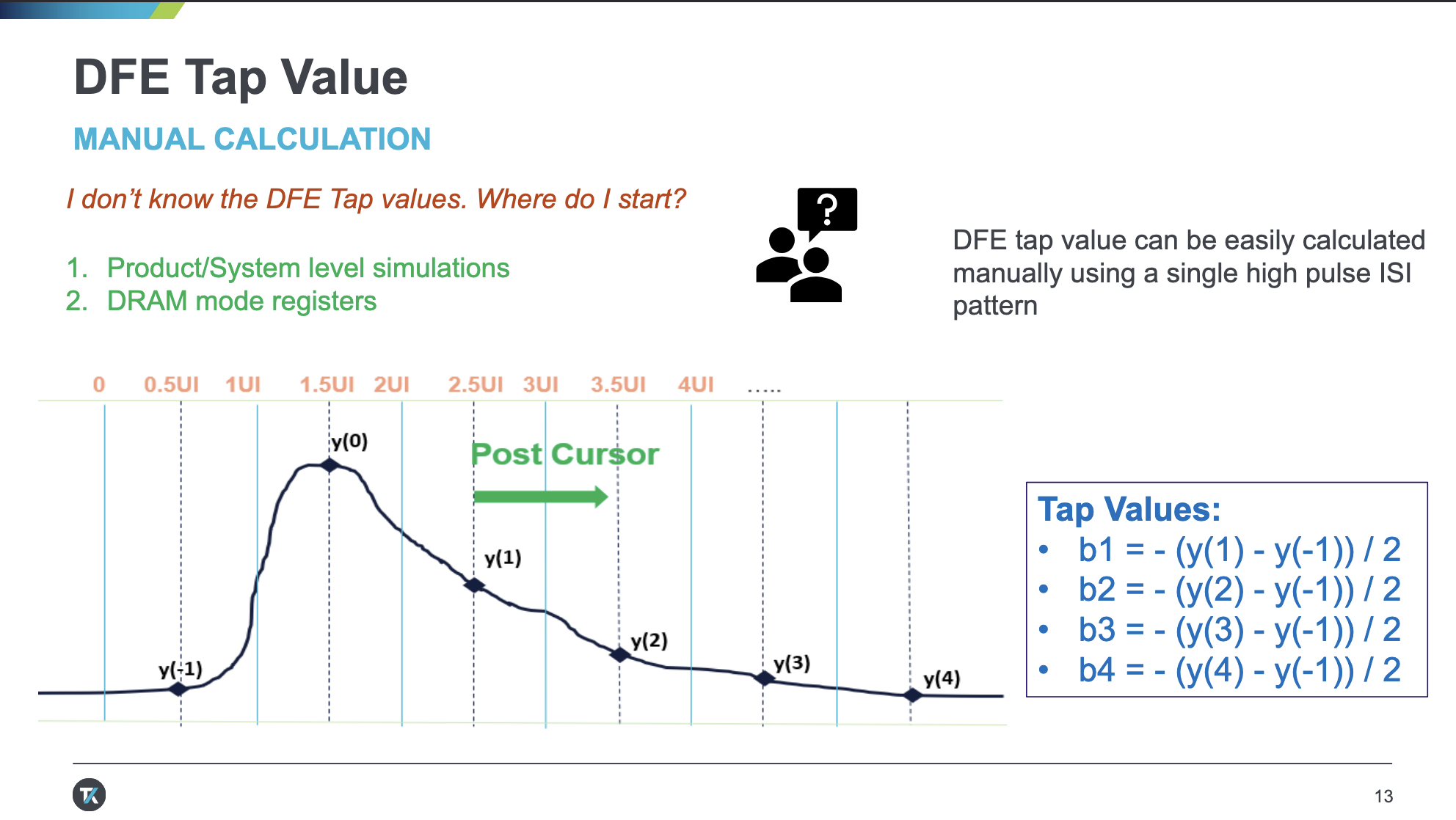
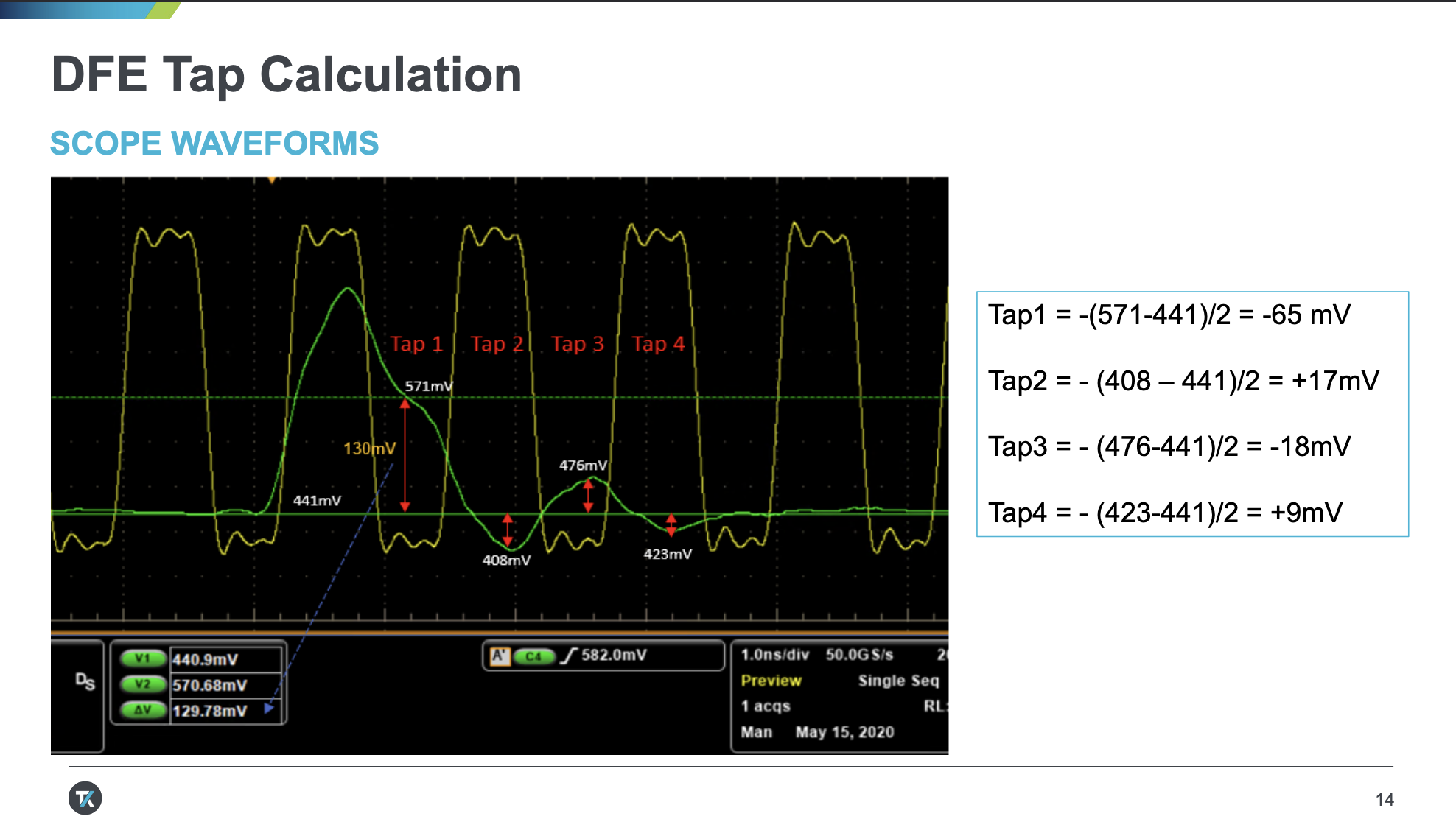
DDR5 DFE
DDR5 引入了 DFE 来改进信号完整性。关于 DFE,详见 信号处理 中的介绍。
DDR5 支持 4-Tap DFE,也就是说,考虑的是最近四个符号对当前符号带来的干扰,对应四个系数。为了测量出这四个系数,在训练的时候,首先发出一个脉冲,然后观察它的响应,通过不断调整系数,抵消它对后续符号的干扰。
相关阅读
- DDR4 Bank Groups in Embedded Applications
- DDR4 Tutorial - Understanding the Basics
- DDR5/4/3/2: How Memory Density and Speed Increased with each Generation of DDR
- DDR5 vs DDR4 DRAM – All the Advantages & Design Challenges
- Understanding DDR3 Write Leveling and Read Leveling
- Will HBM replace DDR and become Computer Memory?