计算机图形学
本文参考了如下网站:
齐次坐标
齐次坐标是在 3 维的坐标 \((x, y, z)\) 的基础上,添加一维,变成 \((x, y, z, w)\),对应 3 维的 \((x/w, y/w, z/w)\),这样做可以方便一些计算。
因此从 3 维坐标转换为齐次坐标的时候,添加一维 \(w = 1\),变成 \((x, y, z, 1)\)。为了让 3 维的向量和点在齐次坐标下可以进行运算,可以向 3 维向量添加一维 \(w=0\),此时 \(w=0\) 表示向量,\(w \ne 0\) 表示点。
坐标变换
OpenGL 中坐标变换经过了如下的步骤:
- 物体坐标,4D 齐次坐标
- 乘以 Model 和 View 矩阵,得到 4D 齐次坐标
- 乘以 Projection 矩阵,得到 4D 齐次坐标
- 把齐次坐标转换为对应的 3D 坐标,为 Normalized Device Coordinates
- 把 3D 坐标对应到屏幕上的 2D 坐标
Normalized Device Coordinates
NDC(Normalized Device Coordinates)是经过一系列变换以后,得到的最终的 3D 坐标。
以 OpenGL 为例,NDC 就是一个在三个坐标轴上都在 \([-1, 1]\) 之间的立方体,只有在这个立方体中的物体才可能被显示出来。
NDC 的坐标范围在不同的图形 API 下可能不一样,例如 OpenGL 和 WebGL 是从 \((-1, -1, -1)\) 到 \((1, 1, 1)\),而 DirectX-12、Metal、Vulkan 和 WebGPU 是从 \((-1, -1, 0)\) 到 \((1, 1, 1)\),也就是 Z 轴上的范围只有 \([0, 1]\)。
最后显示在屏幕上的时候,显示区域的左下角就对应 \(x=-1, y=-1\),右上角对应 \(x=1, y=1\)(也可能是左上角 \(x=-1, y=-1\),右下角 \(x=1, y=1\),不同的图形 API 规定不同)。\(z\) 轴对应深度,显示在前面的(\(z\) 较小的)会遮挡显示在后面的(\(z\) 较大的)。
因此 NDC 到屏幕坐标的对应关系是:
- x 轴:-1 -> x, 1 -> x + w
- y 轴:-1 -> y, 1 -> y + w
- z 轴:-1 -> n, 1 -> f
其中 x, y, w 和 h 用 glViewport 函数设置,n 和 f 用 glDepthRange 设置。
正交投影
正交投影要做的是把一个长方体线性映射到 NDC 中,以 OpenGL 为例,也就是要映射到三个维度上都是 \([-1, 1]\) 之间的立方体。
这个长方体的边和坐标轴平行,因此可以用以下几个变量来定义长方体的坐标:
- left, right, top, bottom:定义了长方体上平行于 X-Y 屏幕的面的位置,其中 left 和 right 就是 X 轴上的最小值和最大值,bottom 和 top 就是 Y 轴上的最小值和最大值
- near,far:定义了长方体在 Z 轴上的区间,离原点最近的平面的 Z 值是
-near,最远的平面的 Z 值是-far
下面用这些坐标的首字母来简称:\(l\) 代表 left,依此类推。
目标是把这个长方体映射到 \([-1, 1]\) 的立方体上。
首先考虑 X 轴:要线性地把 \(x=l\) 映射到 \(x=-1\),把 \(x=r\) 映射到 \(x=1\),可以得到 \(x' = \frac{2}{r-l}x-\frac{r+l}{r-l}\)。
同理,Y 坐标的计算公式是 \(y' = \frac{2}{t-b}y-\frac{t+b}{t-b}\)。
Z 轴上多了一个负号:线性地把 \(z=-n\) 映射到 \(z=-1\),把 \(z=-f\) 映射到 \(z=1\),得到 \(z' = \frac{-2}{f-n}z-\frac{f+n}{f-n}\)。
注:如果 NDC 的 Z 轴范围是 \([0, 1]\),那么 Z 轴的计算公式就是 \(z' = \frac{-1}{f-n}z-\frac{n}{f-n}\)
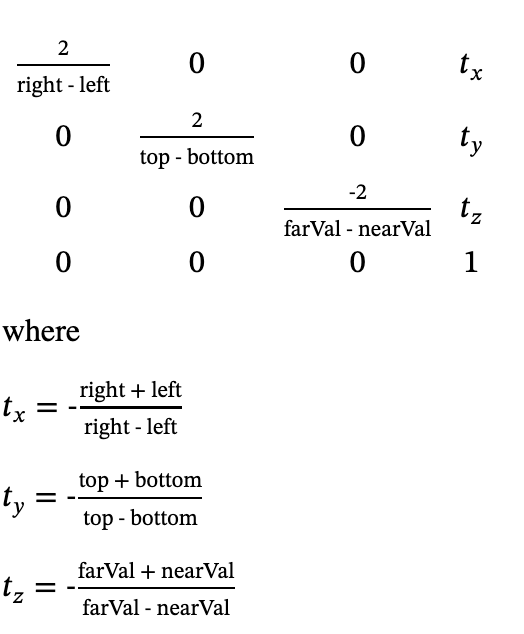
总结一下就是:
考虑到实际采用的是齐次坐标系,\(w\) 不变,所以 \(w' = w\)。把上面的等式写成矩阵的形式,就是:
这正是 OpenGL 正交投影函数 glOrtho() 所计算的矩阵:
mesa 中的实现:
// Source: https://github.com/Mesa3D/mesa/blob/957009978ef6d7121fc0d710d03bc20097d4d46b/src/mesa/math/m_matrix.c#L813C1-L840
void
_math_float_ortho(float *m,
float left, float right,
float bottom, float top,
float nearval, float farval)
{
#define M(row,col) m[col*4+row]
M(0,0) = 2.0F / (right-left);
M(0,1) = 0.0F;
M(0,2) = 0.0F;
M(0,3) = -(right+left) / (right-left);
M(1,0) = 0.0F;
M(1,1) = 2.0F / (top-bottom);
M(1,2) = 0.0F;
M(1,3) = -(top+bottom) / (top-bottom);
M(2,0) = 0.0F;
M(2,1) = 0.0F;
M(2,2) = -2.0F / (farval-nearval);
M(2,3) = -(farval+nearval) / (farval-nearval);
M(3,0) = 0.0F;
M(3,1) = 0.0F;
M(3,2) = 0.0F;
M(3,3) = 1.0F;
#undef M
}
透视投影
透视投影要做的是把一个四棱台(Square Frustum,四棱锥水平切开,底面和顶面是正方形,其余四个面都是梯形)映射到 NDC 上。其中四棱台的四条棱延长以后,交于原点。也就是说焦点就是坐标轴的原点。
相比正交投影,透视投影最大的不同在于它近大远小的特性,更加贴近实际:正交投影无论深度多少,看到的物体大小不变;而在透视投影中,从原点出发,到 near 平面上的一点连成射线,这条射线上的点都对应同一个屏幕上的点,因此远的物体在屏幕上看的小,近的物体在屏幕上看得大。
因此在实现透视投影的时候,就要利用这条从原点出发到 near 平面的一点的射线:由于这条射线上的点都对应屏幕上同一个点,因此在 NDC 中也对应同一个 \((x', y')\) 坐标。那么,在计算 \(x'\) 和 \(y'\) 的时候,先利用相似三角形关系,把点映射到 near 平面上(near 平面的 Z 坐标是 \(z=-n\)):
这样就得到了四棱台到长方体的映射,但是这里涉及到对 \(z\) 的除法运算,为了在矩阵中实现针对 \(z\) 的除法运算,需要利用齐次坐标自带的除法:\((x, y, z, w) \to (x/w, y/w, z/w)\),也就是说,把 \(z\) 的值挪到 \(w\) 上,就相当于实现了除法。按照这个思路,可以得到下面的矩阵:
其中 \(A\) 和 \(B\) 是未知数。验证一下上面的矩阵是否实现了除法:
首先是生成齐次坐标:
矩阵变换以后:
再从齐次坐标变回来,得到 \((-\frac{nx}{z}, -\frac{ny}{z}, -A-\frac{B}{z})\)。可以看到,x 和 y 都得到了和前面用相似三角形计算出来一样的结果,但是 z 的值出现了变化。但是没有关系,虽然 z 的值变了,但是它依然是保序的,只需要继续保证它在 \([-f, -n]\) 范围即可:
求解可得 \(A=n+f, B=-nf\),因此前面的矩阵就是:
到这一步,就完成了四棱台到长方体的映射,接下来就是正交投影了,把长方体映射到 NDC 上,因此最终整体的投影矩阵就是把两个矩阵乘起来(正交投影矩阵左乘上面的矩阵),得到的结果如下:
这就是最终的透视投影的矩阵。需要注意的是,它假设了输入的坐标的 \(w=1\),如果输入的齐次坐标的 \(w \ne 1\),计算结果就会有问题。在 OpenGL 中,可以用 gluPerspective() 函数得到它:
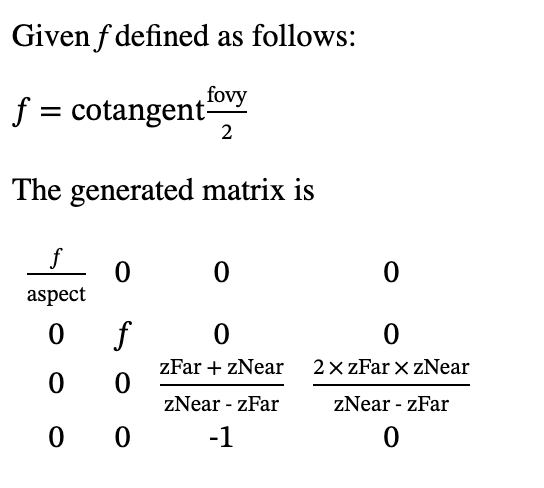
和上面的结果看似不同,但只要设定 \(r=-l, t=-b, f=\frac{n}{t}, aspect=\frac{r}{t}\),两个矩阵就是一样的。也就是说 gluPerspective 采用了透视投影的特殊情况:左右和上下对称。
其中 aspect 是长宽比(x 轴除以 y 轴);\(f=cot(\frac{fovy}{2})\) 是这么推导的:y 方向上的视野角度上下对称,角度大小是 \(fovy\),那么在水平线上方的角度就是 \(\frac{fovy}{2}\),而这个角度在三角形中,它的对边是 \(t\),邻边是 \(n\),所以 \(tan(\frac{fovy}{2})=\frac{t}{n}\),反过来就得到 \(f=\frac{n}{t}=cot(\frac{fovy}{2})\)。
更加通用的 OpenGL 函数是 glFrustum,它得到的矩阵和上面推导出来的矩阵是一样的,没考虑特殊情况。
mesa 中的实现:
// Source: https://github.com/Mesa3D/mesa/blob/957009978ef6d7121fc0d710d03bc20097d4d46b/src/mesa/math/m_matrix.c#L773-L797
void
_math_matrix_frustum( GLmatrix *mat,
GLfloat left, GLfloat right,
GLfloat bottom, GLfloat top,
GLfloat nearval, GLfloat farval )
{
GLfloat x, y, a, b, c, d;
GLfloat m[16];
x = (2.0F*nearval) / (right-left);
y = (2.0F*nearval) / (top-bottom);
a = (right+left) / (right-left);
b = (top+bottom) / (top-bottom);
c = -(farval+nearval) / ( farval-nearval);
d = -(2.0F*farval*nearval) / (farval-nearval); /* error? */
#define M(row,col) m[col*4+row]
M(0,0) = x; M(0,1) = 0.0F; M(0,2) = a; M(0,3) = 0.0F;
M(1,0) = 0.0F; M(1,1) = y; M(1,2) = b; M(1,3) = 0.0F;
M(2,0) = 0.0F; M(2,1) = 0.0F; M(2,2) = c; M(2,3) = d;
M(3,0) = 0.0F; M(3,1) = 0.0F; M(3,2) = -1.0F; M(3,3) = 0.0F;
#undef M
matrix_multf( mat, m, MAT_FLAG_PERSPECTIVE );
}
View 矩阵
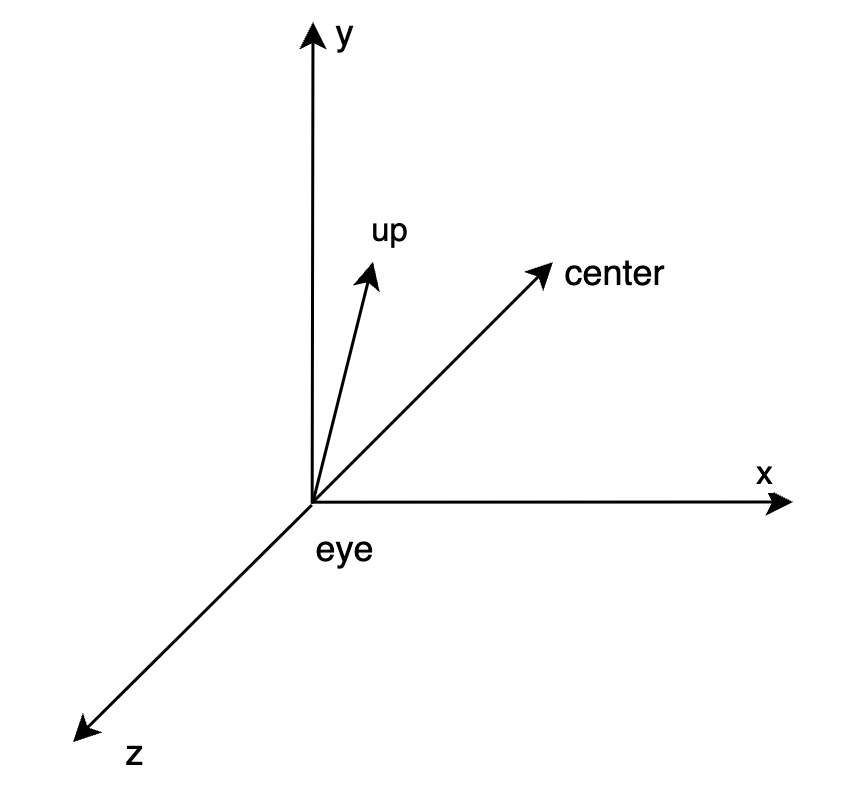
OpenGL 中,经过 Model 和 View 矩阵映射后得到 Eye Coordinates,相机位于 (0, 0, 0),且看向 -Z 轴的方向。计算相机 View 矩阵的 OpenGL 函数是 gluLookAt。
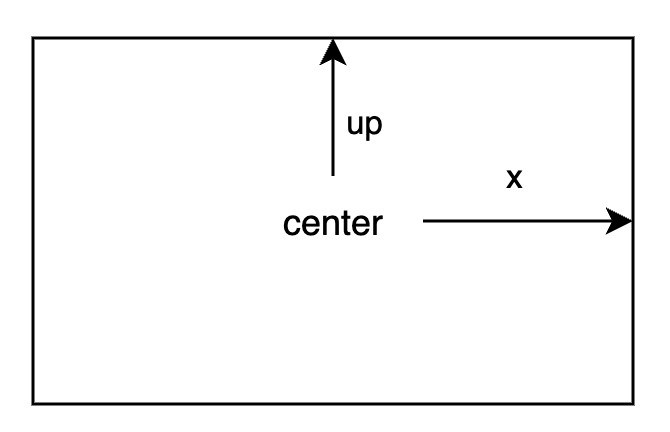
在映射之前,相机位于世界坐标的 (eyeX, eyeY, eyeZ),视线看向 (centerX, centerY, centerZ) 点(视野正前方),以及视野里向上的方向在 3D 里的向量 (upX, upY, upZ)(视野的上方,y 轴)。
那么相机正对的向量 F=(centerX-eyeX, centerY-eyeY, centerZ-eyeZ),这个方向在映射后的坐标系中就是 -Z 轴。令 UP=(upX, upY, upZ),UP 最终在视野里看到的是沿 y 轴向上,但是映射以后可能会有 z 的分量,也就是 F 和 UP 不一定垂直,后面需要考虑这一点。
对 \(F\) 进行标准化,得到 \(f\);对 UP 进行标准化,得到 \(u\);由于 \(u\) 和 \(f\) 确定了 Y-Z 平面,所以求 X 方向的向量,直接计算叉积即可:\(s = f \times u\),由于 \(f\) 指向 -Z,\(u\) 在 Y-Z 平面中 Y 为正的半平面,所以得到的 s 指向的是屏幕的右侧,不妨规定右侧是 X 正半轴(右手系)。此时再叉积,得到 Y 轴的方向:\(y = s \times f\)。
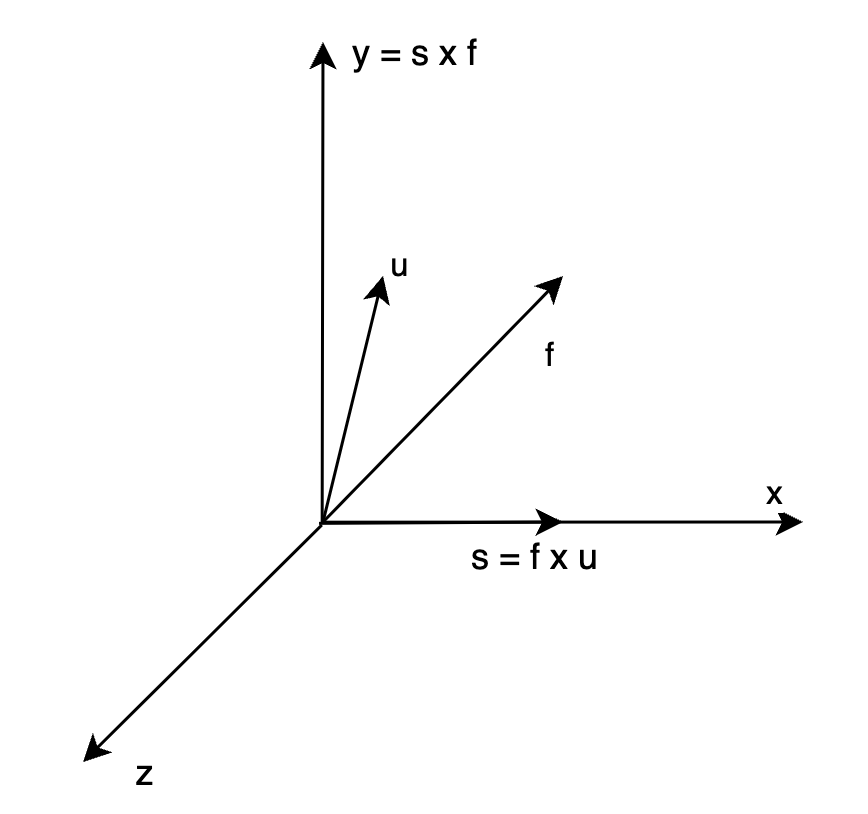
此时三个轴上的向量都有了:X 轴正方向是 s,Y 轴正方向是 y,Z 轴负方向是 f。由于叉积以前已经做了标准化,所以这三个向量都是单位向量。那么坐标系的变换矩阵应该实现下面的映射:
- \(Ms = M(s_x, s_y, s_z)^T = (1, 0, 0)^T\)
- \(My = M(y_x, y_y, y_z)^T = (0, 1, 0)^T\)
- \(Mz = M(f_x, f_y, f_z)^T = (0, 0, -1)^T\)
于是:
这里依赖了三个向量 \(s\) \(y\) \(-f\) 都是单位向量,且互相正交的性质。
把齐次坐标的 w 维度加回来,就是:
以上矩阵解决了相机坐标系的问题,剩下就是把坐标 (eyeX, eyeY, eyeZ) 挪到 (0, 0, 0) 上:
这样就得到了完整的 View 矩阵。
mesa 中的实现:
// Source: https://gitlab.freedesktop.org/mesa/mesa/-/blob/c6a80dc32ef17bc972d4137ce7444ebed4d28ebb/src/glu/sgi/libutil/project.c#L108
// Comments added
void gluLookAt(GLdouble eyex, GLdouble eyey, GLdouble eyez, GLdouble centerx,
GLdouble centery, GLdouble centerz, GLdouble upx, GLdouble upy,
GLdouble upz)
{
float forward[3], side[3], up[3];
GLfloat m[4][4];
/* Compute f = center - eye */
forward[0] = centerx - eyex;
forward[1] = centery - eyey;
forward[2] = centerz - eyez;
up[0] = upx;
up[1] = upy;
up[2] = upz;
normalize(forward);
/* Side = forward x up */
cross(forward, up, side);
normalize(side);
/* Recompute up as: up = side x forward */
cross(side, forward, up);
__gluMakeIdentityf(&m[0][0]);
/* s_x s_y s_z */
m[0][0] = side[0];
m[1][0] = side[1];
m[2][0] = side[2];
/* y_x y_y y_z */
m[0][1] = up[0];
m[1][1] = up[1];
m[2][1] = up[2];
/* -f_x -f_y -f_z */
m[0][2] = -forward[0];
m[1][2] = -forward[1];
m[2][2] = -forward[2];
/* Update view matrix */
glMultMatrixf(&m[0][0]);
glTranslated(-eyex, -eyey, -eyez);
}
光线追踪
Whitted-style ray-tracing 是一种典型的光线追踪算法,它的实现思路是:
- 对于要绘制在屏幕上的点,计算它在 3 维空间中的对应的位置,与相机的原点构成一个射线
- 计算射线与场景中表面的第一个交点,根据表面的类型进行不同的处理:
- 漫反射(Diffuse):找到所有的光源,找出那些可以照亮交点的光源(光源到交点之间没有遮挡),计算出光源对这一点的贡献
- 镜面反射(Specular):计算出反射光,把反射光当成视线,继续递归
- 镜面反射 + 折射(Refraction):分别计算出反射光和折射光,分别递归然后按照 Fresnel 方程加权求和
可以看到,所有的光线在递归终止的时候,要么是在漫反射表面上,要么就是没有找到相交的表面。
辐射度量学
参考 路径追踪(Path Tracing)与渲染方程 (Render Equation) 和 GAMES101 Lecture 15:
- Radiant energy Q:光源向空间中辐射的能量,单位是 J
- Radiant flux(power) \(\Phi\):光源在单位时间内向空间中辐射的能量,单位是 W
- Solid angle \(\omega\):立体角,单位是 steradian/square radian 球面度,简写 sr;是在球面上一个小平面的面积除以半径的平方,即 \(\omega=A/r^2\)
- Radiant intensity I:光源在单位立体角内的 Radiant flux,单位是 W/sr
- Irradiance E:单位面积接受到的 Radiant flux,即 \(E=\Phi/A\),单位是 \(W/m^2\)
- Radiance L:单位面积下,接收到来自单位立体角的 Radiant flux,单位是 \(W/sr \cdot m^2\)
Rendering equation
含义:从平面上的 \(p\) 点出发,向 \(\omega_r\) 发射的 Radiance 包括两部分:
- \(L_e(p, \omega_o)\):这个点本身发的光,例如光源
- \(\int_{\Omega} L_i(p, \omega_i) f_r(p, \omega_i, \omega_o) (n \cdot \omega_i) \mathrm{d} \omega_i\):考虑半球面上的任意一个入射方向 \(\omega_i\),这个方向上入射到 \(p\) 点的 Radiance 是 \(L_i(p, \omega_i)\),其中有一定比例会反射到 \(\omega_o\) 方向上,这个比例就是 BRDF \(f_r(p, \omega_i, \omega_o)\),最后由于入射方向和平面的法方向有一个夹角 \(\theta\),根据 Lambert's Cosine Law,需要乘上 \(\cos \theta = n \cdot \omega_i\) 项。
Bidirectional reflectance distribution function
BRDF(Bidirectional reflectance distribution function)指的是在一个表面上,特定角度(\(\omega_i\))的入射光有多大比例会被反射到特定角度(\(\omega_o\))的出射光。
常见的 BRDF 有:
- Lambertian:一般用于漫反射表面,光均匀反射到各个角度,因此和出射角度无关:\(f=c/\pi\),其中 \(c\) 是表面的颜色,除以 \(\pi\) 是为了满足能量守恒,计算过程见 Deriving Lambertian BRDF from first principles
- Phong 和 Blinn-Phong:用于 OpenGL Fixed-function pipeline
- Cook-Torrance:\(f=k_d\frac{c}{\pi} + k_s\frac{DFG}{4(n \cdot \omega_i)(n \cdot \omega_o)}\),前面的 \(k_d\frac{c}{\pi}\) 和 Lambertian 一样,后面的 \(DFG\) 表示三个函数的乘积,分别是 Normal Distribution Function,Fresnel Function 和 Geometric Attenuation Function,详见 Physically-Based Rendering Cook-Torrance Reflectance Model 和 LearnOpenGL CN - Theory
图形 API 对比
下面给出不同图形 API 或者库在约定上的不同:
| OpenGL | Direct3D | Metal | Vulkan | |
|---|---|---|---|---|
| NDC 采用 | 左手系 | 左手系 | 左手系 | 右手系 |
| NDC 中 z 的范围 | [-1, 1] | [0, 1] | [0, 1] | [0, 1] |
| NDC (-1, -1) 在 | 左下角 | 左下角 | 左下角 | 左上角 |
| Framebuffer (0,0) 在 | 左下角 | 左上角 | 左上角 | 左上角 |
参考:
- Unity - Manual: Writing shaders for different graphics APIs
- Coordinate systems - gpuweb
- Vulkan 集成:图形 API 坐标系对比及解决方案
- Vulkan’s coordinate system
另外还推荐阅读:
抗锯齿/超分辨率/帧生成
- SSAA(Super Sampling Anti Aliasing)/FSAA(Full Scene Anti Aliasing): 按更高的分辨率渲染,再降采样到屏幕分辨率,计算量很大。
- MSAA(Multi Sampling Anti Aliasing):按更高的分辨率来进行覆盖测试和深度测试,即一个像素有多个采样点,每个采样点都要找到覆盖了这个点的三角形,但每个三角形只进行一次着色(SSAA 是每个采样点进行一次着色),着色结果会复制到这个三角形覆盖的所有采样点上。如果有多个三角形覆盖了不同的采样点,最后相当于是按照覆盖的采样点个数加权平均。最坏情况下,每个采样点都属于不同的三角形,这时候性能会退化为 SSAA,但大多数情况,一个像素的多个采样点属于同一个三角形,这时候性能就很好。
- NVIDIA DLSS(Deep Learning Super Sampling) 1.0:按更低的分辨率渲染,用 AI 进行超分辨率,再降采样到屏幕分辨率上,例如 1920x1080 渲染,AI 超分辨率到 15360x8640,再降采样到 3840x2160。每个游戏需要专门训练模型,经过 AI 超分辨率,一个像素变成 64 个像素。
- NVIDIA DLSS(Deep Learning Super Sampling) 2.0:和 DLSS 1.0 不同,DLSS 2.0 是一种 TAAU(Temporal Anti Aliasing Upscaling)算法,Temporal 意思是利用了多帧的信息,去预测高分辨率的输出。DLSS 2.0 支持不同的超分辨率档位:Quality 就是按照长宽各是原来 66.7% 的分辨率去渲染,Balanced 是 58.0%,Performance 是 50.0%。用低分辨率渲染以后,再用通用的 AI 超分辨率网络,不再需要给每个游戏训练单独的网络。
- NVIDIA DLSS(Deep Learning Super Sampling) 3.0:引入了帧生成技术,每渲染一张图,就生成出新的一张图,即有一半的图像是生成出来的。
- NIS(NVIDIA Image Scaling):开源的图形缩放和锐化算法,非 AI,无时序信息。用低分辨率渲染,再用 NIS 进行放大,即实现了超分辨率。
- AMD FSR(FidelityFX Super Resolution) 1:和 NIS 类似,开源的图形缩放和锐化算法,非 AI,无时序信息。前身是 Fidelity Contrast Adaptive Sharping(CAS)锐化技术。
- AMD FSR(FidelityFX Super Resolution) 2:开源的图形缩放和锐化算法,非 AI,引入了时序信息。
- AMD FSR(FidelityFX Super Resolution) 3:开源的图形缩放和锐化算法,非 AI,引入了时序信息和帧生成。
- AFMF(AMD Fluid Motion Frames):在 AMD 驱动上实现的帧生成,软件无感知。
- Intel XeSS(Xe Super Sampling):开源,类 DLSS,用 AI 进行超分辨率。
参考:
- 请问 FXAA、FSAA 与 MSAA 有什么区别?效果和性能上哪个好?
- A Quick Overview of MSAA
- 免费的性能增强是怎么来的?DLSS/NIS/FSR 技术解析
- Deep learning super sampling
- GPUOpen
- 详细剖析 AMD FSR 算法